Difference between revisions of "2013 Southeast Pennsylvania FTC Regional Qualifying Tournament"
From DEW Robotics
MaiKangWei (talk | contribs) |
MaiKangWei (talk | contribs) (→SE Pennsylvania FTC Qualifier Photo Gallery) |
||
| (15 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
| + | {{#ev:youtube|h86k0rWFcq8|300|right|Teleoperated portion of qualification match 8}} | ||
| + | We went (3-2-0) in qualifiers, finishing as 10<sup>th</sup> seed in a field of 20 teams. We were not selected for eliminations, nor did we win any awards. | ||
| + | |||
| + | We did, however, learn a lot. Had fun too! | ||
| + | |||
| + | ==What worked== | ||
| + | * We did | ||
| + | * Inspection | ||
| + | * Drive-train | ||
| + | * Stability - even with battery mounted at the lower arm axis | ||
| + | * Getting on the ramp in autonomous | ||
| + | * Flag raising (w/ original broken & repaired flag raiser) - new flag raiser is too flexible | ||
| + | |||
| + | ==What didn't== | ||
| + | * Hanger - pinned the 5/8" tubing, but the set screws did not hold the steel shaft | ||
| + | * Block collection & scoring - we were a very low-yield block scorer | ||
| + | **Collection very difficult | ||
| + | **We generally collect 1 or 2 blocks (never 4) | ||
| + | **beater bar does not stay on | ||
| + | **collected blocks are frequently lost (esp with beater bar off) | ||
| + | **ejected blocks sometimes miss baskets; lost score | ||
| + | |||
| + | ==Thoughts & observations== | ||
| + | *Hanger | ||
| + | **Explore alternative approaches | ||
| + | **Center arm on top tube with independent rotation and spring-loaded lift? | ||
| + | **If we keep this approach: | ||
| + | ***Need to key the steel drive shaft - and if possible increase the shaft diameter - Maybe hardened steel shaft | ||
| + | ***Hooks should probably be reversed & lowered; back up to engage | ||
| + | ***Latex tubing "springs" can assist lift once shafts are secured | ||
| + | ***Current hooks higher than they need to be | ||
| + | ***Alignment seems reasonably straightforward | ||
| + | *Block collector | ||
| + | **Ability of arm to travel past straight up and to score on opposite side would speed scoring as the robot would not need to turn around | ||
| + | ***Requires "losing" the 4-bar arm (maybe) | ||
| + | **Explore alternative approaches | ||
| + | *Lego autonomous dumper | ||
| + | **Seems to show promise | ||
| + | **Consider a servo replacement? | ||
| + | |||
| + | ==SE Pennsylvania FTC Qualifier Photo Gallery== | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:FTC7314_Oxford_131116_csm-1.jpg|Brad, CJ & Andrew Weissman take the robot through inspection | ||
| + | Image:FTC7314_Oxford_131116_csm-2.jpg|Attempt at hanging | ||
| + | Image:FTC7314_Oxford_131116_csm-3.jpg|''Now, that's a hat!'' | ||
| + | Image:FTC7314_Oxford_131116_csm-4.jpg|Robot on practice field | ||
| + | Image:FTC7314_Oxford_131116_csm-5.jpg|Spill | ||
| + | Image:FTC7314_Oxford_131116_csm-6.jpg|Brad, Andrew Weissman & Nicholas | ||
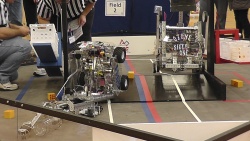
| + | Image:FTC7314_Oxford_131116_csm-7.jpg|Match action | ||
| + | Image:FTC7314_Oxford_131116_csm-8.jpg|Raising the flag | ||
| + | Image:FTC7314_Oxford_131116_csm-9.jpg|Match end | ||
| + | Image:FTC7314_Oxford_131116_csm-13.jpg|Trevor, CJ & Andrew Weissman preparing for the final qual match | ||
| + | Image:FTC7314_Oxford_131116_csm-11.jpg|CJ in the selection line-up | ||
| + | Image:FTC7314_Oxford_131116_csm-12.jpg|The top 4 | ||
| + | </gallery> | ||
| + | |||
---- | ---- | ||
| − | [[Category:FTC]][[Category:Events]][[Category:Photo Galleries]] | + | [[Category:FTC]][[Category:Events]][[Category:Photo Galleries]][[Category:Block Party!]] |
Latest revision as of 03:23, 9 September 2014
We went (3-2-0) in qualifiers, finishing as 10th seed in a field of 20 teams. We were not selected for eliminations, nor did we win any awards.
We did, however, learn a lot. Had fun too!
Contents
What worked
- We did
- Inspection
- Drive-train
- Stability - even with battery mounted at the lower arm axis
- Getting on the ramp in autonomous
- Flag raising (w/ original broken & repaired flag raiser) - new flag raiser is too flexible
What didn't
- Hanger - pinned the 5/8" tubing, but the set screws did not hold the steel shaft
- Block collection & scoring - we were a very low-yield block scorer
- Collection very difficult
- We generally collect 1 or 2 blocks (never 4)
- beater bar does not stay on
- collected blocks are frequently lost (esp with beater bar off)
- ejected blocks sometimes miss baskets; lost score
Thoughts & observations
- Hanger
- Explore alternative approaches
- Center arm on top tube with independent rotation and spring-loaded lift?
- If we keep this approach:
- Need to key the steel drive shaft - and if possible increase the shaft diameter - Maybe hardened steel shaft
- Hooks should probably be reversed & lowered; back up to engage
- Latex tubing "springs" can assist lift once shafts are secured
- Current hooks higher than they need to be
- Alignment seems reasonably straightforward
- Block collector
- Ability of arm to travel past straight up and to score on opposite side would speed scoring as the robot would not need to turn around
- Requires "losing" the 4-bar arm (maybe)
- Explore alternative approaches
- Ability of arm to travel past straight up and to score on opposite side would speed scoring as the robot would not need to turn around
- Lego autonomous dumper
- Seems to show promise
- Consider a servo replacement?
SE Pennsylvania FTC Qualifier Photo Gallery

Brad, CJ & Andrew Weissman take the robot through inspection

Attempt at hanging

Now, that's a hat!
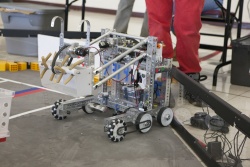
Robot on practice field
Spill

Brad, Andrew Weissman & Nicholas

Match action

Raising the flag

Match end

Trevor, CJ & Andrew Weissman preparing for the final qual match

CJ in the selection line-up

The top 4











