Difference between revisions of "FTC 7314 Engineering Notebook 2015-10-10"
From DEW Robotics
MaiKangWei (talk | contribs) (→Competition Season Meeting) |
TheBadJosh (talk | contribs) |
||
| (19 intermediate revisions by 2 users not shown) | |||
| Line 17: | Line 17: | ||
!Objectives / Systems !! Hypotheses, tests, observations, conclusions, plans | !Objectives / Systems !! Hypotheses, tests, observations, conclusions, plans | ||
|- | |- | ||
| − | | ''' | + | | '''Lynx Motion tread system data''' |
| − | * | + | | |
| + | * The Lynx Motion tread system is (as advertised) a far more robust tread system than the Tetrix Treads. | ||
| + | * An assembled 32-link x 2" wide lynx motion tread weighs in at 376g; 11.75 g/link (0.0259 lb<sub>m</sub>/link). | ||
| + | * An assembled 6-"tooth" sprocket with a 6mm hub and (4) bolts (4-40 x 5/8" SHCS) weighs 26g (0.0573 lb<sub>m</sub>). | ||
| + | * An assembled 6-"tooth" sprocket with an idler axle with bolts and bearings weighs 31g (0.0683 lb<sub>m</sub>). | ||
| + | * The 32-link belt (main drive) has a measured C-C distance of 14 in. | ||
| + | * The 16-link belt (fore drive extension) has a measured C-C distance of 5-3/8 in. | ||
| | | | ||
| − | + | |- | |
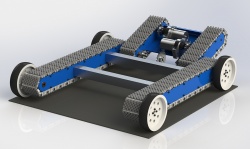
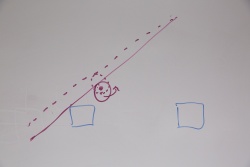
| − | | ''' | + | | '''Conceptual design of hybrid wheeled/tread drive-train w/ fore-extension''' |
| | | | ||
| − | * |} <!-- End of tasks table; DO NOT REMOVE --> | + | * 4 in wheels (tetrix) drive well on the floor and can climb initial horizontal bars in the lower section of the mountain. |
| + | * The 4 in wheels are helpless (without tracks) once the robot is onto the mid & high sections of the mountain. Except, the 4 in wheels can help prevent roll-down. | ||
| + | * Treads (tetrix treads) do not drive well in the floor. | ||
| + | * With a 50 deg angle in the high section, traction and center-of-mass are of first concern. | ||
| + | * Articulated forward tread extension facilitates climbing. It also allows center of mass to be shifted forward and down as the robot climbs, improving stability and traction. | ||
| + | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
<br /> | <br /> | ||
| Line 33: | Line 44: | ||
| '''Milling for chassis''' | | '''Milling for chassis''' | ||
| | | | ||
| − | * Braden helped cut the parts for the center supports of the new | + | * Braden helped cut the parts for the center supports of the new chassis design,and also milled parts for the drive train of the chassis |
* Josh completed rough cutting all pieces of the chassis. He plans to mill most of the rough cut pieces on Monday. Josh used the horizontal band saw for a majority of the cuts, while using the vertical band saw for the few plates he had to cut. | * Josh completed rough cutting all pieces of the chassis. He plans to mill most of the rough cut pieces on Monday. Josh used the horizontal band saw for a majority of the cuts, while using the vertical band saw for the few plates he had to cut. | ||
| − | *Daniel milled a 1-inch metal tube in half. Paul the mentor mentored Daniel on how to use the mill. | + | *Daniel milled a 1-inch metal tube in half for the front of the robot for protection. Paul the mentor mentored Daniel on how to use the mill. |
| − | *today mentor paul taught trent how to mill for the | + | *today mentor paul taught trent how to mill for the chassis |
|- | |- | ||
| '''Installing Coding Programs''' | | '''Installing Coding Programs''' | ||
| Line 46: | Line 57: | ||
| | | | ||
*Justin was helping Amal with the computer program, and helping the people mill in the workshop. Justin was milling parts for the chassis. | *Justin was helping Amal with the computer program, and helping the people mill in the workshop. Justin was milling parts for the chassis. | ||
| − | |||
|} <!-- End of tasks table; DO NOT REMOVE --> | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
== Action and idea Journal== | == Action and idea Journal== | ||
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
| − | image:ResQ_151009-1.jpg| | + | image:ResQ_151009-1.jpg|Start of drive-train/chassis design |
image:ResQ_151009-2.jpg| | image:ResQ_151009-2.jpg| | ||
image:ResQ_151010-1.jpg| | image:ResQ_151010-1.jpg| | ||
image:ResQ_151010-2.jpg| | image:ResQ_151010-2.jpg| | ||
| + | image:FTC7314_151010-1.jpg|Paul works with Trent, Daniel & Justin - cutting metal for the chassis | ||
| + | image:FTC7314_151010-2.jpg|Making a motor count | ||
| + | image:FTC7314_151010-3.jpg| | ||
| + | image:FTC7314_151010-4.jpg|Measuring tread sprocket C-C distance of lynx motion treads | ||
| + | image:ResQ_151011-1.jpg| | ||
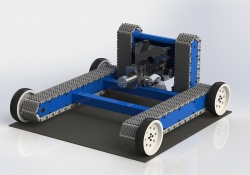
| + | image:ResQ_151011-2.jpg|CAD rendering with fore-drive unit deployed. drive chains added to model. | ||
| + | image:Chain_calculator_fore_angle_drive.jpg|Chain loop calculation - fore angle drive | ||
</gallery> | </gallery> | ||
Latest revision as of 04:07, 4 December 2015
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 10-October-2015 | 2:00-5:00 PM | TCHS Brandywine | Amal, Justin, Jacob, Trevor, Josh, Daniel, Trent, Braden |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans | |
|---|---|---|
| Lynx Motion tread system data |
|
|
| Conceptual design of hybrid wheeled/tread drive-train w/ fore-extension |
|
| Tasks | Reflections |
|---|---|
| Milling for chassis |
|
| Installing Coding Programs |
|
| Installing Android studio and milling |
|
Action and idea Journal
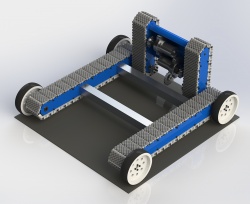
Start of drive-train/chassis design


Paul works with Trent, Daniel & Justin - cutting metal for the chassis
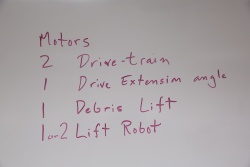
Making a motor count

Measuring tread sprocket C-C distance of lynx motion treads
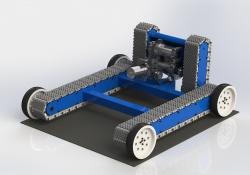

CAD rendering with fore-drive unit deployed. drive chains added to model.

Chain loop calculation - fore angle drive











| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|