Difference between revisions of "FTC 7314 Engineering Notebook 2015-11-02"
From DEW Robotics
Akhila2014 (talk | contribs) (→Competition Season Meeting) |
Akhila2014 (talk | contribs) (→Competition Season Meeting) |
||
| (One intermediate revision by the same user not shown) | |||
| Line 19: | Line 19: | ||
| '''Daniel and Bennet drilled holes''' | | '''Daniel and Bennet drilled holes''' | ||
| | | | ||
| − | *Daniel drilled holes in the component panel and got mad because the holes that were already drilled were not aligned. | + | *Daniel drilled holes in the component panel and got mad because the holes that were already drilled were not aligned. He plans to rectify this most terrible situation by drilling holes next meeting that line up. He will double check all measurements to assure that it does not happen again. |
| − | *Bennett drilled holes in the panel and tried to screw in screws into those holes. | + | *Bennett drilled holes in the panel and tried to screw in screws into those holes. The panel was going to be used to house the scoring and intake system. He plans to help in the re-drilling effort next meeting. |
|- | |- | ||
| '''Climber Scoring''' | | '''Climber Scoring''' | ||
| | | | ||
| − | * Myles helped find dimensions for the bucket | + | * Myles helped find dimensions for the climber scoring bucket. The bucket will be used to score the climbers in autonomous for the extra 20 points per climber. The final plan is to attach the bucket to a lever arm controlled by a servo motor. |
| | | | ||
|- | |- | ||
| '''Programing "lesson"''' | | '''Programing "lesson"''' | ||
| | | | ||
| − | * Justin listened in to the programing team to learn how to program | + | * Justin listened in to the programing team to learn how to program more efficiently. He learned from Akhila and Mr. Abersold so that he may be able to program in case either of those may not be at a competition or meeting where programming is necessary. |
|- | |- | ||
| − | | '''Motor | + | | '''Motor Configuration''' |
| | | | ||
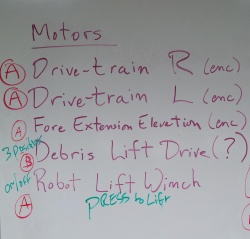
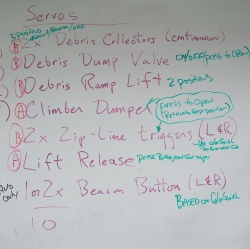
*Today, the motor configuration was finally revealed to the programming team. The tentative map is as follows. | *Today, the motor configuration was finally revealed to the programming team. The tentative map is as follows. | ||
| Line 48: | Line 48: | ||
* Today we had some trouble. The robot would do what it was told but not correctly. we have tried many things, and we still cant get it. Eventhough we didn't finish this script, we did try and got a bit of progress. I feel we were way more productive then last time and could inprove apoun it even more tomorrow if we keep up the good work. | * Today we had some trouble. The robot would do what it was told but not correctly. we have tried many things, and we still cant get it. Eventhough we didn't finish this script, we did try and got a bit of progress. I feel we were way more productive then last time and could inprove apoun it even more tomorrow if we keep up the good work. | ||
* Jacob and Akhila, with the help of Mr. Abersold, tried to work out the compass sensors. Over the week, the compass was tested, and it seemed to work really well, so they thought they would pay it some more attention. | * Jacob and Akhila, with the help of Mr. Abersold, tried to work out the compass sensors. Over the week, the compass was tested, and it seemed to work really well, so they thought they would pay it some more attention. | ||
| − | * The meeting started pretty well, but then they noticed that the robot wasn't driving straight. The code was tested again and looked over, but there didn | + | * The meeting started pretty well, but then they noticed that the robot wasn't driving straight. The code was tested again and looked over, but there didn't seem to be any coding error. It was concluded that one motor moved faster than the other. This is going to be tough to work around, because all the values have to be changed and tested, but it will happen. Hopefully the final robot's motors will be more even. |
| − | * Another problem was a bug that was found. The bug involved the encoders not being reset after each step. The team thinks that this same bug | + | * It was decided that they wouldn't sweat too much over the nuances of this particular robot, because it is the prototype. The final bot will have its quirks, so it would be wiser to make sure everything works, and really start to fine tune when there was access to the real robot. |
| + | * Another problem was a bug that was found. The bug involved the encoders not being reset after each step. The team thinks that this same bug applies to the compass as well, which would explain why the compass program wasn't working too well either. Although a solution wasn;t found at this meeting, they are confident it will be fixed in the near future. | ||
* In all honesty, the bugs were a little frustrating, and Jacob and Akhila really hope they can fix it soon. | * In all honesty, the bugs were a little frustrating, and Jacob and Akhila really hope they can fix it soon. | ||
|- | |- | ||
Latest revision as of 06:50, 4 December 2015
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 2-November-2015 | 6:00-9:00 PM | TCHS Brandywine |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans | |
|---|---|---|
| Daniel and Bennet drilled holes |
| |
| Climber Scoring |
|
|
| Programing "lesson" |
| |
| Motor Configuration |
|
| Tasks | Reflections |
|---|---|
| Programming |
|
| Task in bold |
|
Action and idea Journal
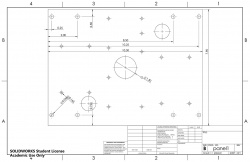
Drive base PP panel










Drawings
Drive base PP panel on ResQ robot - Rev 3 Provides mounting for (2) solenoid controllers and (1) solenoid
| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|