Difference between revisions of "FTC 7314 Engineering Notebook 2015-11-23"
From DEW Robotics
MaiKangWei (talk | contribs) |
TheBadJosh (talk | contribs) |
||
| (2 intermediate revisions by 2 users not shown) | |||
| Line 35: | Line 35: | ||
| '''Programming''' | | '''Programming''' | ||
| | | | ||
| − | * | + | * Today was a really good meeting for the programming team! Jacob and Akhila, with the help of Mr. Abersold, got a lot of work done! |
| + | * Over the past few meetings, Jacob and Akhila have been working on the floor autonomous routine, which involves the robot moving toward the color beacon, pushing the button, and scoring two climbers. | ||
| + | * During these meetings, they had a lot of issues concerning the color sensor readings for white. No matter how much they looked over the code, they couldn't find the bug! (although, some other bugs with the compass were found). | ||
| + | * This meeting, Akhila and Jacob closely monitored the logs each time the program was run, something that wasn't paid attention to before. They found out that no readings at all were coming up for the white color. Before, they had considered that the readings weren't strong enough. | ||
| + | * Then, they looked at readings for the other colors, and found that when the color sensor was placed directly over the white, the readings for green were the highest, meaning that the alpha color was the bug. (Look out for Green is the New White, and FTC 7314 original series, coming to a streaming platform convenient to you!) | ||
| + | * After, they changed the code to read green and tested it again. Success! Just to be sure, they tested again, and again. It worked all times! The movement is still a little choppy, so the code still needs to be refined. | ||
| + | * Another problem that arose was that the robot drifted off quite a bit during it's long travel to the beacon. This was solved by shortening the distance, and changing the angle that the robot turned at in the beginning. | ||
| + | * Next meeting, the team hopes to finish this auton by adding the push button sensor. Also, up until this point, programming tests have been performed on a prototype robot from summer (affectionately named Mr. Roboto), so values will have to be tweaked according to the nuances of the final robot. Time is running short, but the team will try to make the best of it! | ||
|- | |- | ||
| '''Axle Building''' | | '''Axle Building''' | ||
| | | | ||
| − | *Daniel worked on lathing | + | *Daniel worked on lathing the axels to be used for the new worm gear and was taught how to move at the correct speed as to not break anything, yet fast enough to finish before aging several years. |
|- | |- | ||
| Line 57: | Line 64: | ||
image:FTC7314_141123-4.jpg|Detail - fore elevation drive w/ 6mm keyed output shaft | image:FTC7314_141123-4.jpg|Detail - fore elevation drive w/ 6mm keyed output shaft | ||
image:FTC7314_141123-5.jpg| | image:FTC7314_141123-5.jpg| | ||
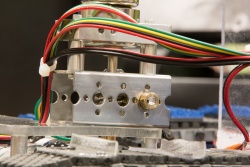
| − | image:FTC7314_141123-6.jpg| | + | image:FTC7314_141123-6.jpg|Bennett installs paddles in debris lift track |
| − | image:FTC7314_141123-7.jpg| | + | image:FTC7314_141123-7.jpg|Robot with debris servos and debris lift track installed |
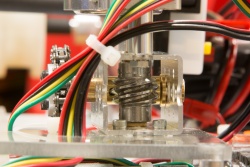
image:FTC7314_141123-8.jpg|Detail of coaxial debris lift drive axle | image:FTC7314_141123-8.jpg|Detail of coaxial debris lift drive axle | ||
</gallery> | </gallery> | ||
Latest revision as of 05:35, 3 December 2015
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 23 November 2015 | 6-9 pm | TCHS Brandywine | Snarr, Akhila, Amal, Matt, Jake, Daniel, Myles, Justin, Braden |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans |
|---|---|
| Programming |
|
| Objective in bold | Matt help dissemble the lift prototype to get extra parts
|
| Tasks | Reflections |
|---|---|
| Programming |
|
| Axle Building |
|
| Workshop, ramp, and servos |
|
Action and idea Journal
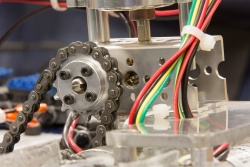
Detail - fore elevation drive w/ 6mm keyed output shaft

Detail - fore elevation drive w/ 6mm keyed output shaft


Bennett installs paddles in debris lift track
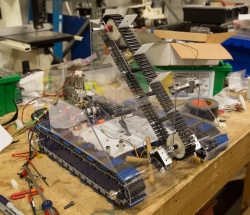
Robot with debris servos and debris lift track installed

Detail of coaxial debris lift drive axle








| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|