Difference between revisions of "FTC 7314 build October 2013"
MaiKangWei (talk | contribs) (→26-October) |
MaiKangWei (talk | contribs) (→26-October) |
||
| Line 66: | Line 66: | ||
Image:FTC7413_131026_csm-6.jpg|Robot | Image:FTC7413_131026_csm-6.jpg|Robot | ||
</gallery> | </gallery> | ||
| + | |||
| + | ==31-October== | ||
| + | A short crew for this meeting (CJ & Clem). In spite of this, we got a lot of work completed: | ||
| + | * Finished and tested the Flag Lift. Finishing included cutting the crank arms shorter and installing hard, slippery PTFE-impregnated Acetal (polyoxymethylene) contact plates on the teterix beam surfaces restraining the crack blades. | ||
| + | * The arm motor was changed (old one dead) and tested. | ||
| + | * The power switch and battery were logically (but perhaps not optimally) mounted. | ||
| + | * The NXT was shifted to move it away from the frame perimeter for safety. | ||
| + | * The battery, switch and motor controllers were wired. Wired were dressed using wire ties. | ||
| + | |||
---- | ---- | ||
[[Category:FTC]][[Category:Block Party!]] | [[Category:FTC]][[Category:Block Party!]] | ||
Revision as of 13:32, 1 November 2013
Contents
3-October

5-October
10-October
12-October
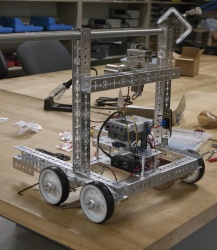
Robot
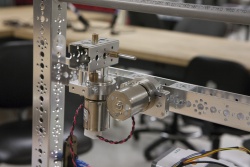
Arm & flag drives

Arm bushings
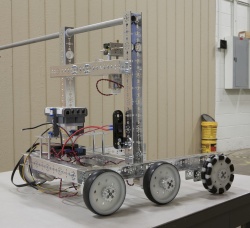
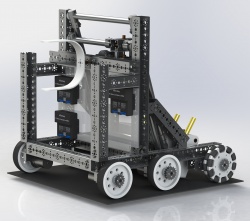
Robot with Omni Wheels
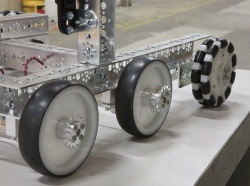
Drive-train sans chains

Arm & flag drives
Arm & flag drives

Arm & flag drives

Arial view of flag raising - note misalignment
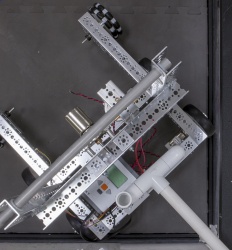
Arial view of flag raising - note misalignment
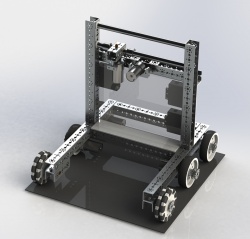
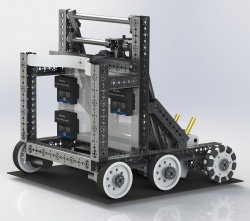
SOLIDWORKS rendering
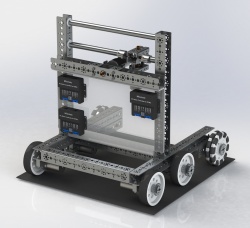
SOLIDWORKS rendering












17-October
19-October - Duel on the Delaware

Andrew Weissman works with Trevor

Dragos
Nicholas

CJ & Nicholas

Testing the robot

Eric & CJ

CJ & Andrew Weissman hold the robot as Nicholas and Julie Christopher test

First ever competition match for 7314! Nicholas, Andrew Weissman & CJ

Defense against teleop block scoring is easy in this game

Brad, Andrew Weissman & Eric

CJ











24-October
Flag crank deployed
Flag crank restrained within chassis perimeter for game start
Plan view (w/out perspective) showing flag crank in both states



26-October
A productive day. We:
- Cut, bent and otherwise fabricated and installed the robot's electronics panels...
- ...and rationally installed many of the key electronic components (NXT & Motor Controllers)
- Replaced the 4:1 worm gear with 20:1
- Started mounting IR Seeker sensors
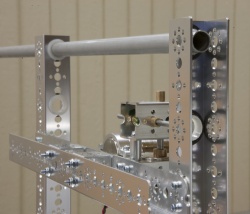
- Built the lower part of the flag pole
- Installed the flag lift
- Scoped out where the limit switches ought to be mounted
- Worked on autonomous coding

Drew, Heather McKown & CJ

Drew

CJ

Trevor, Gary Deaver, Drew, Julie Christopher

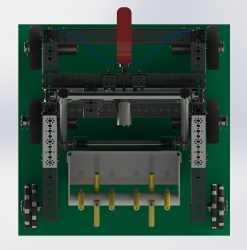
Electronics panel
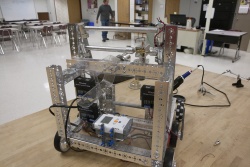
Robot






31-October
A short crew for this meeting (CJ & Clem). In spite of this, we got a lot of work completed:
- Finished and tested the Flag Lift. Finishing included cutting the crank arms shorter and installing hard, slippery PTFE-impregnated Acetal (polyoxymethylene) contact plates on the teterix beam surfaces restraining the crack blades.
- The arm motor was changed (old one dead) and tested.
- The power switch and battery were logically (but perhaps not optimally) mounted.
- The NXT was shifted to move it away from the frame perimeter for safety.
- The battery, switch and motor controllers were wired. Wired were dressed using wire ties.