FTC 7314 build November 2013
From DEW Robotics
Contents
2-November
Flag raiser fix

7-November
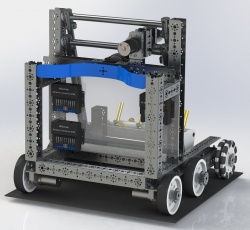
mounting arrangement for dual arm motors driving single worm gear-box
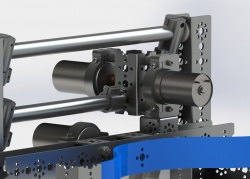
detail view
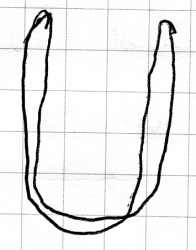
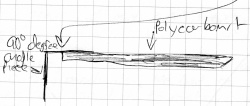
Replacement flag raiser



9-November
11-November
14-November
15-November
16-November
21-November
At Oxford, it was observed that when we attempted to hang, arm elements rotated to prevent hanging. We pinned the pivot tube clamps at the competition, but the steel drive shaft then spun.
Disassembled arm in order to:
- Increase the effective arm drive power by using a larger-diameter steel drive shaft with a keyway (and using keys).
- Abandoning the 4-bar arm to allow more arm movement, thereby enabling scoring in baskets "behind" the robot; need to turn around to score eliminated.
30-November
Programming: Nicholas & Julie worked on communications issues with the Samantha. These were not resolved during the meeting.
Mechanical: Rebuilt the arm drive by replacing the original 4.7mm D-shaft with a 0.25" diam steel shaft with 3/32" keyway cut its entire length. His change required the following:
- Bore out the driven brass worm gear to 0.250" ID
- Broach a 3/32" keyway in the worm rear ID
- Drill the output shaft bushing holes on the worm gearbox to 3/8" (from 8mm)
- Replace output shaft bushings with 0.25" ID bronze flange bushings (1/2" long)
- Cut (3) 3/32" keys: for worm gear and (2) for Hubs
- Assemble output worm gear and shaft w/ key
- Re-assemble input shaft with dual motors and worm
- Bore (2) driven Hubs to 0.250" ID and broach 3/32" keyways
- Reassemble arm drive shaft (including tubing portion)
Materials:
- 1/4" diam 4140 alloy steel shaft such as McMaster-Carr 8927K18 - with keyway cut and cut to 3" length - R04
- (2) SAE 841 Bronze Flanged-Sleeve Bearings for 1/4" shaft diam, 3/8" OD, 1/2" length McMaster-Carr 6338K414 - R05l
- (3) keys cut from steel standard key stock 3/32" x 3/32" McMaster-Carr 98535A125 - R04