Difference between revisions of "DEWBOT VIII Bridge Manipulation"
MaiKangWei (talk | contribs) (→Gen 2 ( Lenape)) |
MaiKangWei (talk | contribs) (→Gen 2 ( Lenape)) |
||
| Line 41: | Line 41: | ||
The 6:1 sprocket reduction with the Denso motor provides a stall torque on the bridge arm pivot of 47 ft lb<sub>f</sub> with an unloaded rotational speed of 0.23 rev/s. With an arm length of 16.6in (pivot to bridge contact) the arm can apply a tangential force of up to 34 lb<sub>f</sub>. | The 6:1 sprocket reduction with the Denso motor provides a stall torque on the bridge arm pivot of 47 ft lb<sub>f</sub> with an unloaded rotational speed of 0.23 rev/s. With an arm length of 16.6in (pivot to bridge contact) the arm can apply a tangential force of up to 34 lb<sub>f</sub>. | ||
| − | The 54T sprocket and bridge arm rotated on a dead axle | + | The 54T sprocket and bridge arm rotated on a dead axle cantilevered from a bracket on one side. On the unsupported side, a flexible connector linked the sprocket to a [http://datasheet.octopart.com/981HE0B4WA1F16-Vishay-datasheet-6387172.pdf Vishay 981HE0B4WA1F16] absolute encoder angle sensor. The flexible connector was originally latex tubing, but later changed to a fiberglass flexible coupling (GJ-6D from Automation Direct). The angle sensor was initially secured to the electronics panel via standoff, but later secured via a flexible polypropylene bracket connected to the bridge arm bracket. |
| + | |||
| + | This arrangement worked (sometimes), but suffered from serious reliability problems: | ||
| + | :* The cantilevered arrangement of the bridge arm and sprocket assembly caused this assembly to wobble relative to the robot - a lot | ||
| + | :* This wobble put a lot of strain on the flexible connection between the driven sprocket and the angle sensor. Sometimes the flexible connection broke. Sometimes it simply lost calibration. Occasionally the angle sensor broke. Any one of these failures rendered the bridge arm unusable and required maintenance and recalibration. | ||
| + | :* The forces applied to the bridge arm would also occasionally bend the bridge arm bracket | ||
| + | At [[DEWBOT VIII ]] | ||
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
Revision as of 03:13, 19 August 2012
1640's Bridge manipulation requirements for Rebound Rumble are:
- Wide chassis orientation to facilitate triple balancing
- Center of mass low enough to prevent robot tipping on inclined and dynamic bridge with robot in the wide orientation
- Pivot "brake" to prevent movement on bridge after achieving balance
- Ability to quickly and certainly lower the bridge to enable mounting from a robot wide side
- The original bridge manipulation mechanism was integrated into the top loading ball hopper
Additional nice to haves were identified after gaining some competition experience:
- Bridge arm can be used to influence center of mass and therefore balance
- There is value in being able to push the bridge up as well as down
- A hook could be employed to link robots to enable hanging off the bridge edge in triple balancing
DEWBOT VIII's bridge manipulation approach & mechanisms witnessed the greatest changes of any functional area during the competition season. Also the greatest improvement.
From a game-play standpoint, the Bridge is HUGE. Both in qualifications (where the coopertition bridge is critical for Qualification Score) and in eliminations (where triple balancing makes an alliance tough to beat), being able to control the bridge and balancing is a critical aspect for success in Rebound Rumble. We ended up being a pretty competent bridge robot (but not best in class).
Contents
Key Technical Challenges
- Our 4-wheel drive-train does not allow us to hang off the edge of the bridge safely
- Our shooter is high; a lower center-of-mass would have been beneficial for balancing (especially triple balancing)
- High center-of-mass, wide orientation and 4-wheel drive-train means that we cannot be the last robot on the bridge in a triple balance (we flip over backwards)
- A stinger would therefore make no sense for us
- The decisions for pivot drive and barrier crossing lead to a decision to forgo pneumatics to manage robot mass - pneumatics would have been very useful for bridge manipulation
- The decision to cross the barrier with pivot drive also committed a lot of brain time to the drive train and chassis design
Concepts (Gen 1 - Build Season)
- Bridge manipulation would be accomplished by an angled protrusion (Bridge Arm) on the robot front - when the robot ran into the bridge, the Bridge Arm would push the bridge down, allowing the robot to mount the bridge
- Force to push the bridge down would be provided by the robot's motion
- The Bridge Arm would be articulated with two positions - no protrusion when raised - able to push the bridge down when lowered
- Limit switches to control the two positions
- The Bridge Arm would support a lycra hopper for top loading - when bridge arm is deployed, the hopper is open for Outbounder feed
Prototypes
Design Details
Issues & Developments
Gen 2 ( Lenape)
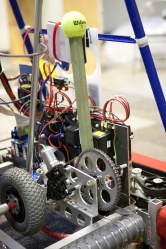
Following Hatboro-Horsham, we implimented an entirely different bridge manipulation approach. The new manupulator was an active arm driven through about 120° of arc which pushed the bridge down using the drive motor's force (in lieu of robot motion).
A Denso motor (Window Motor Left - 262100-3040) was used directly driving a 9T Type 35 sprocket. An axle extended from the 9T sprocket to a bearing block in the facing instrument panel, so the 9T sprocket was supported both sides. The 9T sprocket drove a 62-link type 35 chain and thereby a 54T sprocket, to which the bridge arm was attached.
The 6:1 sprocket reduction with the Denso motor provides a stall torque on the bridge arm pivot of 47 ft lbf with an unloaded rotational speed of 0.23 rev/s. With an arm length of 16.6in (pivot to bridge contact) the arm can apply a tangential force of up to 34 lbf.
The 54T sprocket and bridge arm rotated on a dead axle cantilevered from a bracket on one side. On the unsupported side, a flexible connector linked the sprocket to a Vishay 981HE0B4WA1F16 absolute encoder angle sensor. The flexible connector was originally latex tubing, but later changed to a fiberglass flexible coupling (GJ-6D from Automation Direct). The angle sensor was initially secured to the electronics panel via standoff, but later secured via a flexible polypropylene bracket connected to the bridge arm bracket.
This arrangement worked (sometimes), but suffered from serious reliability problems:
- The cantilevered arrangement of the bridge arm and sprocket assembly caused this assembly to wobble relative to the robot - a lot
- This wobble put a lot of strain on the flexible connection between the driven sprocket and the angle sensor. Sometimes the flexible connection broke. Sometimes it simply lost calibration. Occasionally the angle sensor broke. Any one of these failures rendered the bridge arm unusable and required maintenance and recalibration.
- The forces applied to the bridge arm would also occasionally bend the bridge arm bracket
At DEWBOT VIII

Original prototype mounted on Deux for testing

Molly with sprocket

Andrew & Yahya assemble the bridge arm drive
New bridge arm on Prime

Pushing bridge up at Championship

Pushing bridge down at Championship






Gen 3 ( IRI)
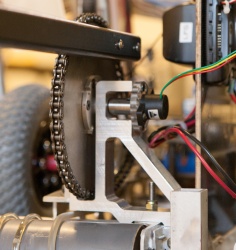
Significant structural improvements were made to the bridge arm mechanism between [BR]2 and the IRI competition to addess the observed mechanical and control weaknesses.
- The bridge arm rotation shaft was supported securely on both sides
- The bridge arm rotation shaft was changed from a dead axle to a live axle - the live axle drives the angle sensor
- Polymer (Derlin) bushings replaced ball bearings
- A substantive 3/8" Al axle is employed for the rotation shaft, with an integral mount provided for the angle sensor shaft
- The new bridge arm bracket includes a secure mount for the angle sensor mounting plate
- The angle sensor mounting plate is identical in design to DEWBOT VII's - at IRI this was in fact a DEWBOT VII spare (made of polycarbonate) but this was subsequently replaced with a machined brass piece (mechanically identical) to reduce flexure
- No change to motor, chain or sprockets
- Captain Jas. Hook's bridge arm was mounted - We had, alas, no takers at IRI
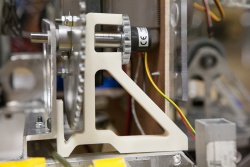
The new bracket is a substantive machined aluminum part. Before fabricating the aluminum bracket, the piece was printed using a 3D printer, assembled in place and tested. This was the team's first experience with a 3D printed part.

Kira with printed prototype bridge arm bracket
Printed prototype bridge arm bracket installed for testing on Deux
New Bridge Arm Bracket - as used at IRI - note polycarbonate sensor mount from DEWBOT VII

New Bridge Arm Bracket - sensor side view

New Bridge Arm Bracket - motor side view

Sensor mount detail





