Difference between revisions of "DEWBOT VI Week Four Build Season Photo Gallery"
Saffranhill (talk | contribs) |
MaiKangWei (talk | contribs) (→Wednesday February 3, 2010) |
||
| Line 115: | Line 115: | ||
Image:DB6_Wk4_20100203_SMW_0025.jpg|Almost connected. Note the magnet mount on the steering drive sprocket for the angle sensor. | Image:DB6_Wk4_20100203_SMW_0025.jpg|Almost connected. Note the magnet mount on the steering drive sprocket for the angle sensor. | ||
Image:DB6_Wk4_20100203_SMW_0036.jpg|Mike Rizzo installing the last chain | Image:DB6_Wk4_20100203_SMW_0036.jpg|Mike Rizzo installing the last chain | ||
| − | Image:DB6_Wk4_20100203_SMW_0026.jpg| | + | Image:DB6_Wk4_20100203_SMW_0026.jpg|Ronit and Ben strategic planning. |
Image:DB6_Wk4_20100203_SMW_0027.jpg|more planning. | Image:DB6_Wk4_20100203_SMW_0027.jpg|more planning. | ||
Image:DB6_Wk4_20100203_SMW_0029.jpg|Ben and Faith McKown | Image:DB6_Wk4_20100203_SMW_0029.jpg|Ben and Faith McKown | ||
Revision as of 00:36, 4 March 2010
Contents
Sunday January 31, 2010
Today's to do list

welded frame mass

Mass of (blue) bumper set

Siri Maley cutting flange for kicker elastic anchor

Christine cutting the cRIO panel

Christine cutting a Jaguar panel

Mike Rizzo broaching a keyway

Impromptue design review

Impromptue design review

Moyer setting up shop

Pivots in assembly

Christine sanding the Jaguar panel

Jen assembling pivots

Mike Rizzo & Siri Maley riveting pivot plates

Foster planing battery box form

Siri fitting a CIM

Pivot with motor, ready for wiring
Pivots on chassis

Zain and Dinesh programing

Siri Maley, Clem McKown & Scott Featherman testing pivot chains

Scott Featherman, Siri Maley & Matt riveting pivot plates

Siri still riveting pivot plates

Siri securing mounts for kicker elastic

Siri cutting pivot plates for elastic mounts

Siri maley, Foster Schucker, and Scott Featherman discussing electronics and pneumatics placements

Mike Rizzo broaching a pivot sprocket keyway

Paul programming

Mike Rizzo still broaching keyways

Matt riveting more pivot plates

Mike Rizzo really broaching those keyways

Matt Safety Czar with safety glasses and a smile.

Douglas & Jen assembling pivots

Parts, parts, where are the parts?

Foster making the form for the battery box

Jen assembling more pivots (Gary Deaver background)

John Weissman and Mike Rizzo really, really broaching keyways

Christine cutting an electronics panel
DJ

Douglas & Jen assembling pivots

Douglas & Jen still hard at work
Andrew CADing

Clem McKown testing the fist pivot in situ

Siri Maley riveting the first bottom pivot plate

Matt (sort of) removing a rivet shaft from a rivet gun

John Weissman, Clem McKown, Siri Maley & Scott Featherman admiring the first pivot module

Clem McKown riveting a pivot plate

Christine cutting an electronics panel

Gary Deaver drilling a pivot

Matt riveting; Mike Rizzo, Clem McKown, Scott Featherman & Siri Maley considering mounting options

















































Monday February 1, 2010

Ben W cutting replacement Jaguar panel

Mark Morun making fine adjustments to pivot parts

Cole, Julie Bachmann & Matt

Cole, Julie Bachmann & Matt hard at work

Douglas & Ben W breaking chain for the pivots

Julie Bachmann & Ben W working on Jaguar panel

The left Jaguar panel clamped into place







Tuesday February 2, 2010

Punxsutawney Phil says that there will be six more weeks of winter, but the robot must ship in three weeks! (AP/Gene J. Puskar)

Mike Rizzo, Jon Davis & Ben R discuss sensors and their locations

Assembled Pivots

Dinesh, Carly & Jen assemble electrical panels

Jen, Carly & Dinesh wire panels

Douglas, Mark Morun & Cole cut square tube on the horizontal band saw

Mike Rizzo grinding to eliminate interference

Pivot test (pass)

Clem McKown & Mike Rizzo laying out work for the final frame welds

Programming Team at work in the Muppet Lab

Douglas & Cole at work on the horizontal band saw

Matt welding

Matt welding

Matt grinding new welds

Matt grinding new welds

Electronics ready for the robot
















Wednesday February 3, 2010

Selina & Jack install a steering motor

Cole and Douglas clean up keys with Gary Deaver

Designers Andrew and Sasha with Dinesh (electrical)
Cole helping the wheels go on

Gary Deaver, Mike Rizzo and Matt assemble the robot

Pivot top

Matt & Mike Rizzo building the robot

Matt & Mike Rizzo building the robot

Pivot top
Robot assembly

Gary Deaver adjusts the magnetic encoder

DEWBOT VI on its feet for the first time

Mike Rizzo & Scott Featherman wiring
Pivot top

A quick controller

DEWBOT VI's first drive

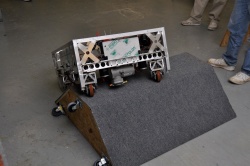
Preparing to climb over the bump (you're going to need a bigger boat!) - we made 4 crossings - 2 forwards & 2 backwards - all safely - & onto concrete landings

Jack and Paul programming.

Media Group hard at work.

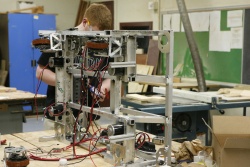
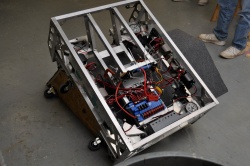
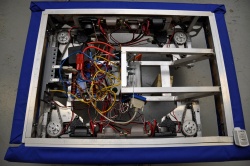
Dewbot VI basic wiring.

Ben programming.

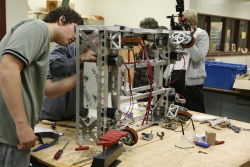
Matt and Mike Rizzo working on chassis.

Mike Rizzo installing one of eight chains.

The push to get the robot moving.
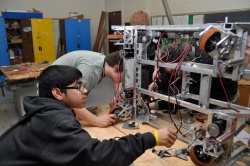
Dinesh working on chassis.
Pivot wheel installed.

Boy, these chains are tough.

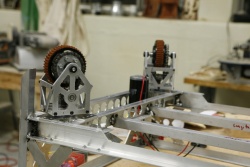
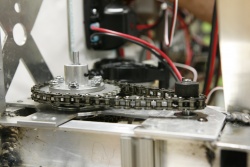
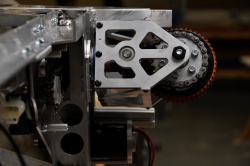
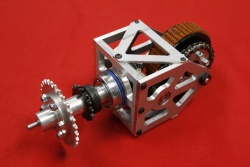
Almost connected. Note the magnet mount on the steering drive sprocket for the angle sensor.

Mike Rizzo installing the last chain

Ronit and Ben strategic planning.

more planning.

Ben and Faith McKown

Clem McKown, Jon Davis, Gary Deaver and Matt discussing chassis build.
Come on you can do it!

Dewbot VI clears the top of the bump.
Dewbot VI Made It!




































Thursday February 4, 2010
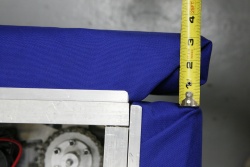
Our maximum bumper gap - is this okay?

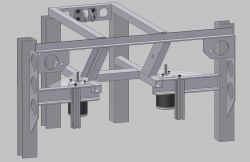
Pivot assembly glamour shots 1/5
Pivot assembly glamour shots 2/5

Pivot assembly glamour shots 3/5

Pivot assembly glamour shots 4/5

Pivot assembly glamour shots 5/5

Kenneth on the line!

Kenneth

Cole with spare drive wheel.

Is it smooth enough yet?

Teamwork!

Cutting Proxy framework.

Kenneth working on programming 4 wheel pivot drive.

and programming...

and programming...

and programming...boy this is tough!
Foster Schucker and Kenneth

Checking measurements for proxy.

Kenneth programing while Clem McKown,Gary Deaver and Cole check out spare pivot wheel.

Clem McKown and Gary Deaver discussing Dewbot VI.

Cole cutting proxy chassis framework.

Cole inspecting the results.

Group admiring Dewbot VI progress.
Dewbot VI with bumpers waiting for programing.

Dewbot VI with Control panel.

























Friday February 5, 2010

Foster Schucker proudly wearing his 1511 reds

Matt, Faith Mckown & Gary Deaver cut aluminum for the proxy chassis
Proxy Chassis
Carly & Nicole

Programming team - Foster Schucker with Ben R & Kenneth





Saturday February 6, 2010
No pictures today, Downingtown got 16" of snow! The robot shop was closed, we will start Week 5 on Sunday.