7th Wheel
Robot agility was perceived to be an important attribute for the Lunacy competition. Agility is the key to defense and expected to be necessary (but not sufficient) for effective offense as well.
A novel 7th Wheel is provided to enable 2-mode driving, thereby enhancing agility.
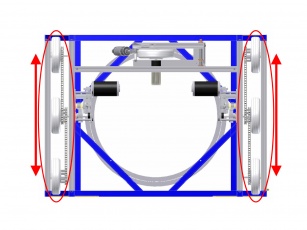
Default 6wd mode
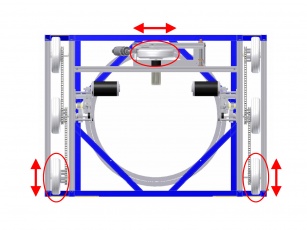
7th wheel active - 3wd pivot mode



In default 6wd mode, the 7th Wheel is raised above the playing surface and inactive. The robot drives and steers in normal tank mode. Pilot/Driver control is tank also, via left and right joysticks.
The Pilot/Driver can activate the 7th Wheel by depressing the trigger on either joystick. This lowers the 7th Wheel, unweighting the rear four main wheels in the process. If the robot is moving when the 7th Wheel is lowered, it acts as a brake (effective since the rover wheel transverse coefficient of friction is higher than the in-line). The three weighted, driven wheels provide an excellent pivot drive with little or no transverse wheel drag (excluding the trailer).
When the 7th Wheel is triggered, joystick control changes to arcade control, with the triggering joystick being the active one. Either Pilot/Driver joystick may be used to activate the 7th Wheel. Releasing the joystick trigger returns the robot the default 6wd mode.
View the pdf format drawings
Development
The 7th Wheel idea grew chiefly out of the detailed drive train study the team conducted after the poor performance of DEWBOT IV's drive train in the prior season. This study yielded two important factors for the 7th Wheel:
1. A detailed understanding of "Twitch" (inspired by Team 1565's system of the same name) and other perpendicular wheel configurations. Though the VEX-scale "Twitch" proved a productive experiment, an FRC-scale pivot robot still seemed largely beyond the team's build season abilities.
2. An impressive drive train turning model accounting for varying frictional coefficients drive base widths and lengths.
Thus, on the Monday after the 2009 kickoff, the Design Team ran drive train simulations on the coefficients provided in the FIRST Kit of Parts. The following are excerpts from that email thread (1/5/09 unless otherwise noted).
Foster Schucker: There is a thread on Chief Delphi...about skid steering. They point to this paper. Upshot is that 4WD and 6WD skid steering may not work well on the wheel/floor setup.
Clem McKown: I've done the turning calcs. Worst-case is the KOP coefficients. If these are correct, 6wd wide will turn, but our current Chassis design (6wd long) will not. 4wd will not turn (period)...Another way to have a turnable Lunatic is to have wheels that pivot in lieu of Tank Drive. Tank Drive is a real problem altogether if the KOP coefficients are correct (even though 6wd wide works). Pivoting wheels solve the problem.
Clem McKown: (1/14/09) I came up with a simple approach to pursuing Siri's idea of a sideways drive for agility. It's a 7th wheel (with a globe motor) in the robot rear center oriented 90° to the 6 main drive wheels. This 7th wheel is normally raised off the field surface. This 7th wheel can be dropped (pneumatically), in which case the robot has just (3) weighted wheels (front left and right and rear center). When in this 3-wheel "pivot mode", the robot should be able to pivot quickly (but will not be able to actually move anywhere).
Siri Maley: Are permanently mounted perpendicular wheels an option? [Since, as aforementioned, "Twitching" would likely be difficult.] Like Miss Daisy (or even a 6wd version).
Clem McKown: If the KOP coefficients are accurate, the perpendicular wheels (evenly weighted) would by-in-large make movement impossible in any direction.
Siri Maley: Very true. Not permanently then, maybe a raise/lower mechanism? At least it would work as a break.
[Note that in fact, DEWBOT V can move in Pivot Mode, sometimes even sideways.] This simple approach was selected for several reasons:

- Sufficient torque – the Globe is adequate in this regard
- Similar velocity to main drive
- Rigidity of the pivoting arm – The arm is exposed to considerable torsional stress when the 7th Wheel is engaged with the robot in motion. To hold up to this stress, the pivoting arm is a double-beam flanking the wheel on either side. Beam elements are (1) 2” angle and (1) 80/20 1020 (1” x 2”) profile. The wheel is supported by both beams.
- Actuation is provided by a 1½” diameter x ½” stroke pneumatic cylinder.
A key liability of the 7th Wheel was that it by-in-large committed us to using pneumatics and making this weight investment. Prior to opting for the 7th Wheel, we were expecting a pneumatics-free Lunacy robot. Once committed, the availability of pneumatics influenced shooter development.
Specifications
- Motor: Globe
- Gearbox: Integral Planetary
- Transmission: Direct Drive
- Wheel: Rover (6" diam)
- Actuation: Bimba 170.5 DP Cylinder