DEWBOT VII Minibot Deployment
Analysis of Minibot deployment considerations and concepts. Updated 23 Jan 2011, Siri.
Contents
Scissors ( V-Bot)
- Initial concept for deploying the Minibot and applied to the V-bot.
- The system was to deploy transverse (to the side) and included an alignment bar with limit switches to help align the deployment system (and robot) with the tower. The alignment bar further served as a mechanical support for the scissors.
- Assembled for testing only on 20-February. Manual deployment tests indicated that this deployment method would not be reliable. Additional issues with off-axis deployment of the one or two 3/4" bore, 5" stroke pneumatic cylinders were unresolved.
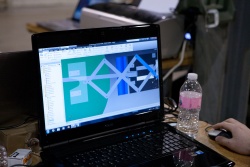
Rich Kulik designing scissors deployment in CAD

Jon Davis placing V-bot on scissors for test

Test deployment 1/5

Test deployment 3/5

Test deployment 4/5

Test deployment 5/5






Bident Forwards ( V-Bot)
On 20-Feb, the launch platform of the Scissors deployment system was adapted to a direct pneumatic deployment. A 1½" bore, 24" stroke pneumatic cylinder was used to power this deployment. In parallel, an 80/20 1010 profile deployment arm supported by 80/20 roller guides carried the launch platform. Standoffs between the roller guides and chassis frame put the deployment at the correct height.
This system was named Bident due to the forked launch platform at the end of a deployment arm.
Due to the overall length of the deployment system, it had to be reoriented to be parallel to the robot's long axis. It was positioned off-axis to avoid interference with the arm and claw; directly over the left inner longitudinal.
A camera aiming forwards and down was to be used to assist in aligning the robot with the tower and to guide the operator in tube pickup. At the Finger Lakes Regional, the camera system did not function.
In testing prior to bagging, this deployment system worked well, although the small opening of the Bident required very accurate alignment with the tower.
At the Finger Lakes Regional, we failed to successfully launch a Minibot. This was primarily due to premature activation of the V-Bot brought on by normal game vibrations, bouncing and bumping.
In addition, the front left corner of DEWBOT VII is not the safest place to live during a competition, and the V-bot was damaged on several occasions.
Bident Forwards deployment System

V-Bot just prior to deployment

V-Bot being deployed



Bident Aft (Fanger)
- Experience at Rochester how exposed the minibot was to game damage on the robot's front left corner. Reversing the deployment placed the minibot at the rear left corner. In this new position, the arm columns provide some protection while also offering a practical anchor for a protective Minibot Hangar.
- While identical in principle to the previous deployment system, significant changes/improvements were incorporated into the reverse bident. These are:
- Increased standoff elevation from 4.25" to 5.75"
- A wider Bident is employed, reducing the level of alignment precision needed. There is an 8" deployment window.
- The camera is mounted on the deployment axis; just below the launch platform
- The Launch platform is adapted to our new minibot, Fanger
- The minibot motors are activated by deployment (by pulling a "hand grenade" pin); not by pole contact
- The minibot is protected by a polycarbonate hangar top & outboard and by the arm columns inboard
- An ad-hoc brace added to stiffen the deployment system at Rochester, which interfered with lifting the robot, is eliminated.
- Extensive testing on deux indicates high deployment reliability and rapid alignment. If alignment misses, the robot can drive the minibot onto the tower.

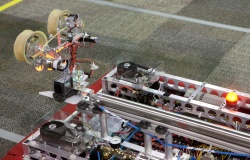
Fanger lifting-off on deployment test

Fanger launch

Off-axis launch (successful)

Minibot Hangar to protect minibot during the game, with camera mounted to aid alignment
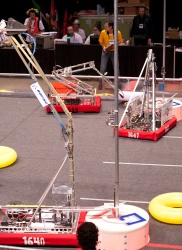
Fanger deployment during Philadelphia qualifications

Fanger deployed during Philadelphia Finals.






Accelerated Deployment
- In the original Bident pneumatic system, used at Rochester & Philadelphia, extension and retraction were accomplished via a single, single-acting solenoid. Pretty standard stuff. But slow, requiring 1.58s (σ = 0.08s) to fully deploy (all measurements taken on deux with 5 samples). Contributing to the slow deployment speed is the need to vent the retraction-side air through the solenoid's restrictive orifice.
- An alternative pneumatic arrangement was tested using two solenoids decoupling extension & retraction. Prior to actual deployment, the retraction-side of the deployment cylinder would be vented (solenoid activated). Then the extension side pressurized for deployment (solenoid acticated). Finally, deactivating both solenoids retracts the deployment cylinder. Deployment time dropped to 0.84s (σ = 0.1s). A good start, but the need to vent retraction-side air (even though no longer under pressure) through the solenoid with its small Cv slows extension and makes the movement uneven.
- A third arrangement was tested. Returning to a single solenoid, the retraction side of the cylinder is open to vent. This output on the solenoid is plugged. Only the extension side is powered. Faster deployment at 0.50s (σ = 0.1s). A normally-closed (NC) manual valve on the solenoid extension-side vent prevents Bident extension prior to deployment (due to the vacuum which any extension would create). The Bident must be retracted manually by opening the NC valve and pushing in the Bident.
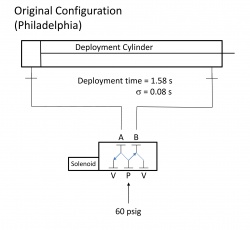
Original pneumatic system, used at Rochester & Philadelphia
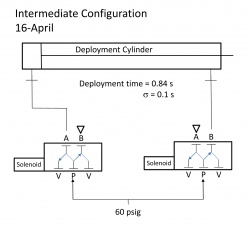
Interum design utilizing decoupled extension & retraction solenoids
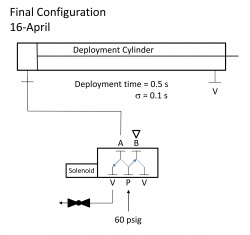
Final schematic, requiring manual retraction


