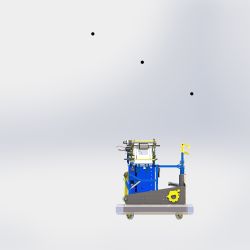
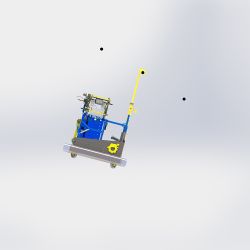
DEWBOT XVII Climber


A pair of Static Hook Posts flank the Climbing Hook Arm. These Posts do not articulate, but the Static Hooks which terminate them do rotate and are spring loaded to allow the Climbing Hook to bring each RUNG to a point below the Static Hooks, then extend to transfer the RUNG from the Climbing Hook to the Static Hooks.
The Climber Gearbox employs four (4) NEO motors and 20:1 reduction designed to allow the robot to climb vertically at a speed of about 12 inches/s and deploy at about 20 inches/s. A dog-based lock allows the Gearbox to be locked into position, both to prevent inadvertent Climber Arm extension and back-driving during climbing.
I'm thinking that many robots (Including DEWBOT XVII) reaching the TRANSVERSAL RUNG will slam into the Drivers' Station window. Hard. This will certainly test the nerves of the drive team in DRIVERS STATION 1. I'm not sure whether this is a game fault or a feature.
Climbing Sequence
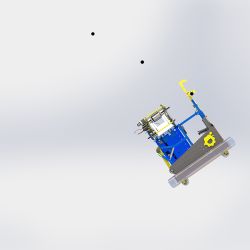
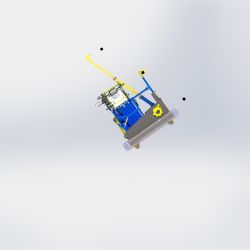
Positioned ready to climb
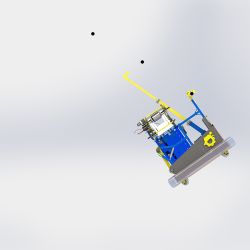
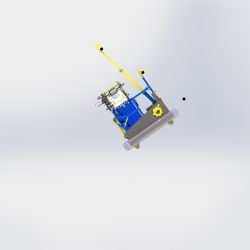
Climbing Arm extended & touching MID RUNG
Climbing Arm retracted - Static Hooks compressed by MID RUNG
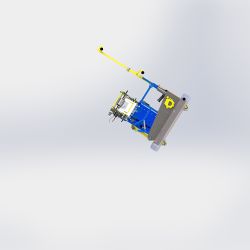
Climbing Arm fully retracted - Static Hooks return to normal position
Climbing Arm extends - MID RUNG transferred to the Static Hooks
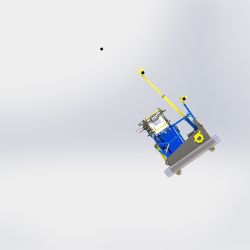
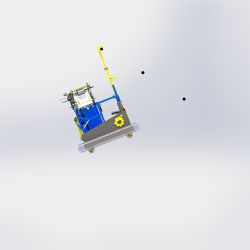
Climbing Arm rotates 20° forward and extends fully
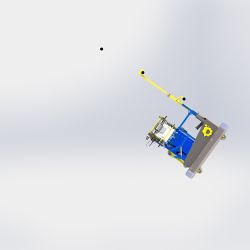
Climbing Arm rotates back to contact the HIGH RUNG
Climbing Arm starts retracting - Hooks onto HIGH RUNG - Starts to pull the Static Hooks off of the MID RUNG
Climbing Arm retracts further - Static Hooks pull off the MID RUNG - DEWBOT swings forward (exciting!)
Climbing Arm continues to retract - Static Hooks compressed by HIGH RUNG
Climbing Arm fully retracted - Static Hooks return to normal position
Climbing Arm extends - HIGH RUNG transferred to the Static Hooks
Climbing Arm rotates 20° forward and extends fully
Climbing Arm rotates back to contact the TRANSVERSAL RUNG
Climbing Arm starts retracting - Hooks onto TRANSVERSAL RUNG - Starts to pull the Static Hooks off of the HIGH RUNG
Climbing Arm retraction pulls Static Hooks off of the HIGH RUNG - DEWBOT swings forward maybe slamming into DRIVER STATION 1 window - Climb complete
















Prototyping
We prototyped the climbing process with a 3-D printed robot model and cardboard & fiberglass rod HANGER.



Climb at Hatboro-Horsham
Evolution
The pneumatic lock on the gearbox turned out to be unnecessary and the pneumatic actuator removed.
The ThriftyBot bearings were not sufficiently rugged for this application and were replaced by ?
The biggest problem we faced in early competitions was a tendency for the robot to bounce off the rung when its swing caused the bumper to hit the previous rung. Efforts to fix this problem with changes in the hook geometry were unsuccessful. Ultimately, a pneumatic latch was added to the center hook to mechanically latch this hook onto the rung.


