FTC 7314 Engineering Notebook 2014-12-30
From DEW Robotics
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 12/30/14 | 4-9pm | TCHS Brandywine | Nick, Laura, Akhila |
| Tasks | Reflections |
|---|---|
| Learning about the IR seeker |
|
| Working on Parking Zone Auton |
|
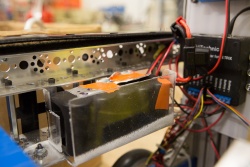
New battery mount in-situ w/ battery

New battery mount in-situ w/out battery
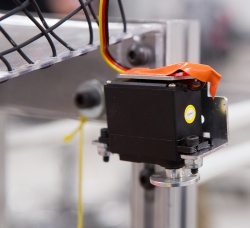
Servo installed for the diverter "valve"
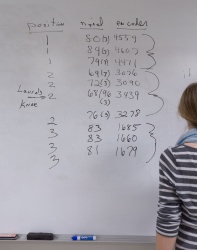
Data collected during center-goal autonomous testing
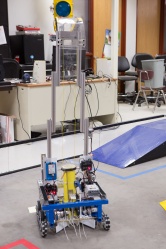
Lift full up for autonomous scoring





| Recorded by: | Date: | Journal Editor: Akhila | Date: |
|---|---|---|---|