FTC 7314 Engineering Notebook 2015-09-14
From DEW Robotics
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Team Members in Attendance: |
|---|---|---|---|
| 14-Sep-2015 | 6:00-8:00 | TCHS Brandywine | Myles, Josh, Akhila, Trent, Braiden, Justin, Amal, Wade, Snarr, Bennett |
| Tasks | Reflections |
|---|---|
| Autonomous |
|
| Teleop |
|
Action and idea Journal



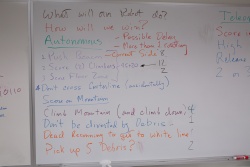
Ranked autonomous objectives
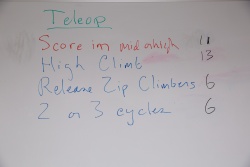
Ranked teleop objectives
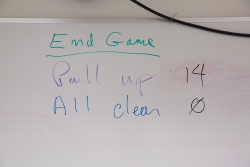
Ranked end-game objectives






| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|