FTC 7314 Engineering Notebook 2015-10-26
From DEW Robotics
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 26-October-2015 | 6:00-9:00 PM | TCHS Brandywine | Trevor, Josh, Daniel, Braden, Seth, Akhila, Amal, Bennett, Matt, Trent, Myles, Justin, Wade |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans |
|---|---|
| Chassis Fabrication |
|
| Tasks | Reflections |
|---|---|
| Axle Preparation |
|
| Driving Practice |
|
| Programming |
|
| Worm gear assembly |
|
| finish welding chassis |
|
Action and idea Journal

Chain loop calculator - Debris lift chain drive

rendered CAD model

Welded main chassis
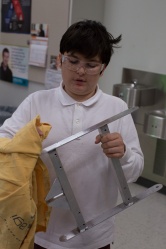
Trent cleans and dries the chassis weldment in preparation for welding

Painted robot parts







| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|