Difference between revisions of "DEWBOT III Philadelphia Regional"
MaiKangWei (talk | contribs) (→Philadelphia (Drexel) Photo Gallery) |
MaiKangWei (talk | contribs) (→Philadelphia (Drexel) Photo Gallery) |
||
| Line 35: | Line 35: | ||
Image:DB3_Drexel_Heather_the_riviter_070331_csm.jpg|''Heather the Riviter'' (note the t-shirt) | Image:DB3_Drexel_Heather_the_riviter_070331_csm.jpg|''Heather the Riviter'' (note the t-shirt) | ||
Image:DB3_Drexel_Ben_McKown_Dave_Siri_queued_070331_csm.jpg|Ben, Clem McKown, Dave, Siri & DEWEBOT III queued for competition | Image:DB3_Drexel_Ben_McKown_Dave_Siri_queued_070331_csm.jpg|Ben, Clem McKown, Dave, Siri & DEWEBOT III queued for competition | ||
| − | Image: | + | Image:DB3_Drexel_setup_070331_csm.jpg|Set-up for match |
| + | Image:DB3_Drexel_autonomous_070331_csm.jpg|Arm deployed during autonomous period | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_01.jpg|Scoring Sequence - 1 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_02.jpg|Scoring Sequence - 2 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_03.jpg|Scoring Sequence - 3 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_04.jpg|Scoring Sequence - 4 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_05.jpg|Scoring Sequence - 5 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_06.jpg|Scoring Sequence - 6 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_07.jpg|Scoring Sequence - 7 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_08.jpg|Scoring Sequence - 8 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_09.jpg|Scoring Sequence - 9 of 10 | ||
| + | Image:DB3_Drexel_scoring_sequence_070331_csm_10.jpg|Scoring Sequence - 10 of 10 | ||
</gallery> | </gallery> | ||
---- | ---- | ||
[[Category:Events]][[Category:DEWBOT III]] | [[Category:Events]][[Category:DEWBOT III]] | ||
Revision as of 23:04, 15 August 2009
We installed the improved Gripper for Philadelphia. What a difference!
The additional driver and operator practice started to show results.
Plus we had our new team shirts (too late for Pittsburgh). And a new camera for taking these photos (these are the first team 1640 robot pictures taken with a Canon EOS 5D).
We finished 26th out of 44 teams with 5 wins and 6 losses in the qualifying matches.
Philadelphia (Drexel) Photo Gallery

Ed Faller & Paul Sabatino operate on the Arm

Frank Stumpo

Ben works on the Arm fix

Frank Stumpo

Heather

John

Paul Sabatino

Ben

John, Foster Schucker, Frank Stumpo & Dave work on the Arm

Foster Schucker, Dave & Frank Stumpo complete the Arm work

Inspection

Cassie

Siri & Heather

Siri & Heather

Dave W

DEWBOT III ready for a practice match (sans bumpers)

Matt

John & Heather

Siri

Dave

Paul Sabatino

John

Ed Faller at ease

Team 1640

Heather the Riviter (note the t-shirt)

Ben, Clem McKown, Dave, Siri & DEWEBOT III queued for competition

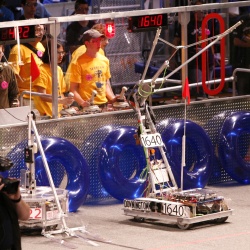
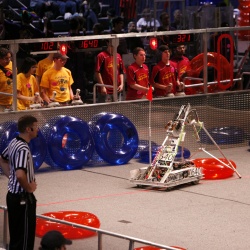
Set-up for match
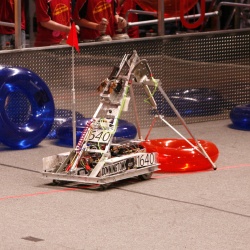
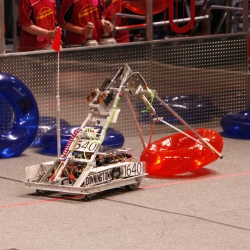
Arm deployed during autonomous period
Scoring Sequence - 1 of 10
Scoring Sequence - 2 of 10
Scoring Sequence - 3 of 10

Scoring Sequence - 4 of 10

Scoring Sequence - 5 of 10
Scoring Sequence - 6 of 10
Scoring Sequence - 7 of 10
Scoring Sequence - 8 of 10
Scoring Sequence - 9 of 10
Scoring Sequence - 10 of 10





































