Difference between revisions of "FTC 7314 Engineering Notebook 2014-09-27"
From DEW Robotics
MaiKangWei (talk | contribs) (→Action and idea Journal) |
Akhila2014 (talk | contribs) |
||
| Line 17: | Line 17: | ||
!Tasks !! Reflections | !Tasks !! Reflections | ||
|- | |- | ||
| − | | '''Making | + | | '''Making the Possessor Prototype ''' |
| | | | ||
| − | * Eric, CJ, and Morgan worked on making a possessor prototype to go against the shooter prototype | + | * Eric, CJ, and Morgan worked on making a possessor prototype to go against the shooter prototype. They would then see which design worked better. The building went well until they found out that they were working with striped locking nuts. They had to find 2 new locking nuts to use for the prototype. After they put the possessor together, they tested it with the big and small balls. They think the shooter is going to have a really tough time going against this possessor. They also used Solidworks to help us prototype the new device. CJ proposed that the wheels that would act as an intake and outtake devices should slide up when it was needed to bring in the game element, or the balls, and slide down to push them out. |
|- | |- | ||
|'''Attaching the Servo to the Prototype for Grabbing Rolling Goals''' | |'''Attaching the Servo to the Prototype for Grabbing Rolling Goals''' | ||
| Line 25: | Line 25: | ||
* Amal and Braden worked on the Servo and trying to attach it onto the prototype for grabbing onto the base of the rolling goals. | * Amal and Braden worked on the Servo and trying to attach it onto the prototype for grabbing onto the base of the rolling goals. | ||
* They also are about to do the wiring for the Servo Controller. | * They also are about to do the wiring for the Servo Controller. | ||
| − | * | + | * Amal and Braden made a system to go up and down to grasp and push and pull the rolling goals. They tested it and it is currently working. |
|- | |- | ||
|'''Linear slide computer work ''' | |'''Linear slide computer work ''' | ||
| | | | ||
| − | * Mentor Andrew and two | + | * Mentor Andrew and two Sab-BOT-Age students, Josh and Justin, worked on the linear slide on the computer with the new custom part. Many problems occurred, like Solidworks freezing many times during the processes, and other people related problems. |
* Josh did most of the work on the computer while Andrew looked over his shoulder and helped when necessary. They managed to finish a prototype that extended above the necessary 120 cm to score in the top goal. | * Josh did most of the work on the computer while Andrew looked over his shoulder and helped when necessary. They managed to finish a prototype that extended above the necessary 120 cm to score in the top goal. | ||
|- | |- | ||
|'''Continue to Prototype the Wheeled Shooter''' | |'''Continue to Prototype the Wheeled Shooter''' | ||
| | | | ||
| − | * Nick and Laura started the day off with some bad news. The rules prohibit | + | * Nick and Laura started the day off with some bad news. The rules prohibit Tetrix motors with modified/no gear box! So the motor they have been using for the past few weeks is illegal. |
| − | * But | + | * But they didn't give up! They worked on gearing the normal motor up so it would have enough speed. Laura taught Braden and a few others what the gears did, and what a gear ratio was. |
| − | * When | + | * When they saw the gears, they were really surprised at how big they were. To get the ideal speed, 3 stages would be needed, and it would take up way too much room, so other possibilities were considered. |
| − | * | + | * They looked through the workshop to find smaller gears/gearboxes, and found banebot gear boxes. They were hoping for about a 20:1 gear ratio, but all the banebots were either 4:1 or 64:1, either too slow or too fast. |
| − | * Then | + | * Then it was discovered they had a gearbox that they could take apart and get a more favorable gear ratio. The closest they could get with the readily available gears was 30:1, but that was close enough for prototyping. |
* Taking apart and modifying the gear box was actually pretty simple, and really fun. | * Taking apart and modifying the gear box was actually pretty simple, and really fun. | ||
| − | * The gear box was originally 300:1, but | + | * The gear box was originally 300:1, but they took out a 10:1 stage. |
| − | * Inside the gearbox was really grease | + | * Inside the gearbox was really greasy! Green grease got everywhere! |
| − | * After modifying the gear box, | + | * After modifying the gear box, the team had to search for the right drill bit so the motor shaft would fit in the gearbox. It took a while, because the drill bits are not all sorted. |
| − | * In the end, | + | * In the end, they got the motor attached to a 30:1 gearbox, and next meeting they will attach it to the shaft with the wheeled shooter on it. The team is not sure if they will have enough power to shoot this ball; a lot of torque was lost adding the gears. |
| − | * | + | * They can't wait to test it next meeting! |
|} | |} | ||
Revision as of 16:48, 4 November 2014
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 9/27/14 | 2pm-5pm | TCHS Brandywine | Laura, Nick, CJ, Justin, Josh, Braden, Amal, Eric, Morgan |
| Tasks | Reflections |
|---|---|
| Making the Possessor Prototype |
|
| Attaching the Servo to the Prototype for Grabbing Rolling Goals |
|
| Linear slide computer work |
|
| Continue to Prototype the Wheeled Shooter |
|
Action and idea Journal




Deborah Drago & John Weissman organize parts & tools

Gary Deaver, Nicholas & Laura

Tetrix motor coupled backwards to a 30:1 VexPro gearbox
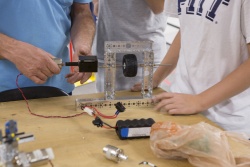
Tetrix motor w/ reversed VexPro gearbox driving a shooter wheel (unsuccessfully)










.
| Recorded by: | Date: | Journal Editor: | Date: | ||
|---|---|---|---|---|---|
| Laura | 9/27/14 |