FTC 7314 Engineering Notebook 2014-09-27
From DEW Robotics
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 9/27/14 | 2pm-5pm | TCHS Brandywine | Laura, Nick, CJ, Justin, Josh, Braden, Amal, Eric, Morgan |
| Tasks | Reflections |
|---|---|
| Making the Possessor Prototype |
|
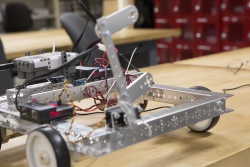
| Attaching the Servo to the Prototype for Grabbing Rolling Goals |
|
| Linear slide computer work |
|
| Continue to Prototype the Wheeled Shooter |
|
| Recorded by: | Date: | Journal Editor: Akhila | Date: |
|---|---|---|---|
Action and idea Journal




Deborah Drago & John Weissman organize parts & tools

Gary Deaver, Nicholas & Laura

Tetrix motor coupled backwards to a 30:1 VexPro gearbox
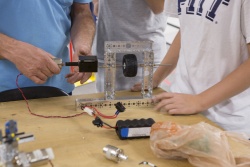
Tetrix motor w/ reversed VexPro gearbox driving a shooter wheel (unsuccessfully)










.
| Recorded by: | Date: | Journal Editor: | Date: | ||
|---|---|---|---|---|---|
| Laura | 9/27/14 |