| Tasks |
Reflections
|
| Building a Goal Grabber and Guide
|
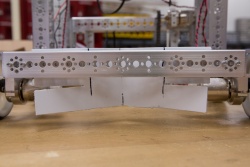
- CJ, Laura, and Mentor Andrew worked on the guide / possessor of the tubes in the game. The device was limited by the fact it could not latch on the top of the tubes bottom piece. They came up with the idea of a mechanism that would bulldoze or push the tube forward. It worked very well except when the balls one of the game elements caught under the robot causing the push device to latch over the bottom piece of the tube. With this set back Laura, Mentor Andrew and CJ concluded they had to have a more efficient device. They came up with a mechanism that would latch onto the holes in the bottom piece of the tube. The tube grabber as it was dubbed was both more efficient on the field and easy to fit in a 18' by 18' robot that is required at the beginning of every match.
- Due to the propinquity of Ramp Riot, they decided that the robot should be able to grab onto the goals and move them around for the scrimmage. It is not realistic to try and score balls at this upcoming tournament.
|
| Creating Scouting Sheets
|
- Brad and Eric worked on the pit scouting and made scouting sheets. Eric and Brad focused on the teams that they will be meeting, ideas of the robot, and what their robot will do.
|
| Attaching the NXT Brain
|
- Eric, Trevor and Braden worked on attaching the brain to the prototype base of the robot which was difficult, and very challenging, but fun to anyways. The brain gave them so much trouble whilst putting it on because there was little space to work with on the robot. Despite these difficulties, They figured a way to attach the brain and get the robot running.
|
| Driver Practice
|
- What Justin did mostly was driver practice and testing new ideas for the next comptition.
|
| Work on Programming
|
- Nick and Akhila finished correctly setting up her computer to work with driving the robot. Nick then discussed with Julie the tasks that the team wanted to complete in autonomous mode. Nick then wrote the code for determining the position of the field centerpiece using the IR sensors.
|