| Tasks |
Reflections
|
| Mount the light sensor
|
- Trevor and Eric mounted the light sensor on the robot for the goal grabber's auto-detection. The light sensor was mounted where the battery was, on an angle at the corner of the goal guide piece. When the goal is angled right in the robot, the pistons will go down and lock to the goal so that the bot has control of the goal during auton and tele-op.
|
| Making the rear roof
|
- Josh and Justin made the rear roof for the robot in order to make sure wiffle balls didn't go into the robot. this will help us avoid going over the 5 ball limit. They made this by first cutting a piece of plastic to 20 1/4x 2 1/4. Then, Andrew helped them bend the roof 4 times to help it fit within the confounds of the robot.
|
| Marketing
|
- Brad and Eric worked on finishing the entry for the FLL Qualifier that the team had volunteered at, adding pictures and jobs that people did. They then worked on starting a robotics card game, starting an outline and drawing out some of the basic cards.
|
| Autonomous Programming
|
- CJ, Laura, and Nick worked on the autonomous program for driving off the ramp and grabbing a 60 centimeter goal then scoring with our two balls given during autonomous then placing it in the parking zone. This in total will be 60 points allowing us to score more in a match.
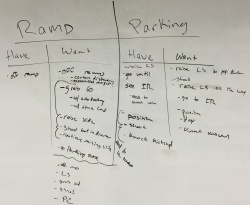
- They started our programming by discussing what they currently have, and what the objectives are for autons starting in both the parking zone, and the ramp.
- For the ramp, all they had at the beginning of the meeting was driving off the ramp. They wanted to go off the ramp, raise the linear slide, grab the 60 with the automatic docking(see below), shoot 2 pre-loaded balls, and maneuver to the parking zone. This was all achieved by the end of the meeting, and we now have one fully working auton.
- For the parking zone, they currently have a way to find the position, and some code to line up with the beacon. This is just a skeleton, and most of the values need to be tweaked before this is working. This will be tweaked on Tuesday.
|
| Teleop Changes
|
- When the servo for the IR arm was switched to the other side of the robot, along with the NXT, it warranted a completely new schematic. Laura worked to create that schematic, and changed some teleop controls in the process.
- The first change she made was on the controls for the intake and bapper. She made them so one button turned them on/off, instead of the operator having to hold them down. There is also a button to change the direction of the intake.
- Next, she worked to fix the bug that caused the intake & bapper to stop after 3 seconds. She realized it was due to a watchdog within the NXT. To fix this, she simply fed the watchdog every second in a parallel loop within teleop.
- Laura also added preset linear slide heights, so an operator could press one button to move it to the 30, 60, 90, and 120 cm heights. This is still buggy and will need to be worked on at a later time.
- Last, but certainly not least, Laura added what she thought to be the coolest of the new controls. She added an "automatic docking", which automatically grabs the goal, with one button press, when the drivers get the robot in the general vicinity of a goal. To start, the pistons are put up, so the drivers do not have to worry about this. Then, the robot can grab the goal. This works by making the robot wiggle up to the goal, moving one side of the robot at a time. This back and forth movement vibrates the base into place. With a new light sensor, the robot is able to tell if the base is all the way in the goal guide. The robot then moves forward a little more, and puts the pistons down. The goal is grabbed, and ready to be filled!
- The docking was designed to make driver's job easier, especially when the goal is facing away from them, but it became handy in other areas, too. This automatic docking was also useful in the ramp autonomous, because the orientation of the rolling goals is unknown. This docking allows us to reliably grab the goal without worrying about the orientation.
|