FTC 7314 Engineering Notebook 2015-09-19
From DEW Robotics
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| Saturday, 19-September-2015 | 2:00-4:00pm | TCHS Brandywine | Josh, Justin, Braden, Amal, Bennett, Wade, Daniel, Trent, Jacob, Myles |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans |
|---|---|
| Climb the Mountain |
|
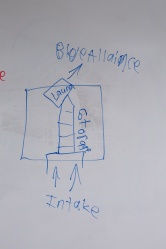
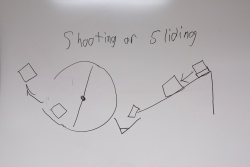
| Debris Intake |
|
| Tasks | Reflections |
|---|---|
| Center of Mass |
|
| Climbing Test |
|
| Debris Storage |
|
Action and idea Journal
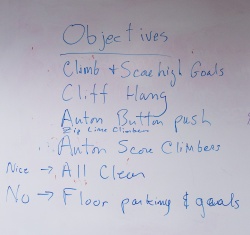
Objectives
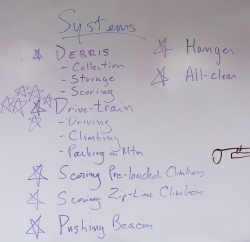
Systems
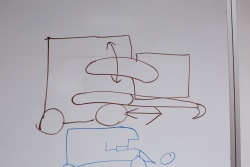


Mountain climbing test


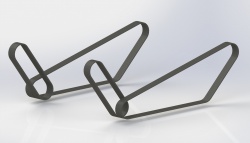
Drive-train concept utilizing articulated treads in front to facilitate climbing












| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|