Difference between revisions of "FTC 7314 Engineering Notebook 2015-10-19"
From DEW Robotics
MaiKangWei (talk | contribs) |
Akhila2014 (talk | contribs) (→Competition Season Meeting) |
||
| (18 intermediate revisions by 3 users not shown) | |||
| Line 8: | Line 8: | ||
| 6:00-9:00 PM | | 6:00-9:00 PM | ||
| TCHS Brandywine | | TCHS Brandywine | ||
| − | | | + | | Josh, Akhila, Braden, Bennett, Seth, Trent, Daniel, Wade, Myles, Amal, Jacob, Trevor |
|} | |} | ||
| Line 17: | Line 17: | ||
!Objectives / Systems !! Hypotheses, tests, observations, conclusions, plans | !Objectives / Systems !! Hypotheses, tests, observations, conclusions, plans | ||
|- | |- | ||
| − | | ''' | + | | '''Intake''' |
| | | | ||
| − | * Daniel worked on the intake . | + | * Daniel worked on the intake, he helped build the new intake slapper devices. These were mounted on continuous servos. this new design had two slappers that went in opposite directions like a gear |
* Myles finished the tank treads and helped Daniel in the Intake. | * Myles finished the tank treads and helped Daniel in the Intake. | ||
* Seth helped Clem and wade finish one of the main tank treads. | * Seth helped Clem and wade finish one of the main tank treads. | ||
| − | * | + | *The team decided on a new concept for the robot, it seems similar. we all got to work with the new design. and got a lot done. |
* Trevor and Braden manufactured a servo intake beater bar, then showed others how to build it. | * Trevor and Braden manufactured a servo intake beater bar, then showed others how to build it. | ||
| + | *Trent was putting together treads with miles and was milling with Josh. This was his first time milling, and he was really surprised at how precise someone has to be when milling. He finds the zeroing a little tedious, but that's okay, because he really enjoys robot-ing and building. | ||
|- | |- | ||
| − | | ''' | + | | '''Milling pieces''' |
| | | | ||
| − | * | + | * Josh worked with Bennett in order to mill and drill the remaining drive chain pieces. They completed cutting all of the pieces, and josh has set up the mill to drill the angled pieces. |
| + | * Bennett worked with Josh to help drill and cut the drive chain pieces. He learned the basics of the mill and is "filled with joy" that he may get to use it more. | ||
|} <!-- End of tasks table; DO NOT REMOVE --> | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
<br /> | <br /> | ||
| Line 44: | Line 39: | ||
!Tasks !! Reflections | !Tasks !! Reflections | ||
|- | |- | ||
| − | | ''' | + | | '''Programming''' |
| | | | ||
| − | * | + | * Today, Amal, Akhila, and Snarr, mentored by Mr. Abersold, thought that the code needed to be clearer, so it was decided to create a new robot class, and moved all of the hardware map code into there. This makes it easier to call the certain motors/controllers and made the code clearer. They also tried to figure out the number if revolutions the motor/ encoder had to make before travelling a certain distance, which, in this case, was six inches. |
| + | * They had trouble with the rotation number because the number listed online was a lot bigger than the ones they were plugging in. This resulted in the robot remaining irresponsive. The issue was really frustrating because figuring out the encoder situation is the first step to a successful autonomous. They also had problems with configuring the encoders. They will try to figure this out next time, and hopefully crack the code (pun intended). | ||
| + | |||
|- | |- | ||
| − | + | ||
| − | |||
| − | |||
|} <!-- End of tasks table; DO NOT REMOVE --> | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
| + | |||
| + | == Action and idea Journal== | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | image:ResQ_151013-1.jpg|Drive base | ||
| + | image:ResQ_151013-2.jpg|Drive base | ||
| + | image:ResQ_151016-1.jpg|First attempt at lift CAD | ||
| + | image:FTC7314_151019-1.jpg|Bennet & Josh on mill | ||
| + | image:FTC7314_151019-2.jpg|Daniel and Braden | ||
| + | image:FTC7314_151019-3.jpg|Akhila & George Abersold | ||
| + | image:FTC7314_151019-4.jpg| | ||
| + | image:FTC7314_151019-5.jpg|Seth & [[User:MaiKangWei | Clem McKown]] working on track system | ||
| + | image:FTC7314_151019-6.jpg| | ||
| + | image:FTC7314_151019-7.jpg|Tread unit partially assembled | ||
| + | image:FTC7314_151019-8.jpg| | ||
| + | image:FTC7314_151019-9.jpg| | ||
| + | image:FTC7314_151019-10.jpg| | ||
| + | image:FTC7314_151019-11.jpg|Tread unit assembled | ||
| + | image:FTC7314_151019-12.jpg|Tread unit assembled | ||
| + | image:FTC7314_151019-13.jpg| | ||
| + | image:FTC7314_151019-14.jpg|Akhila | ||
| + | image:FTC7314_151019-15.jpg|Tread unit with 4" wheels | ||
| + | image:Fore_base_-_Sheet1.jpg|Forward drive extension base plate | ||
| + | image:Skt_angle_R_-_Sheet1.jpg|Right side sprocket mount for drive extension articulation | ||
| + | image:Tread_sideplate_fore_-_Sheet1.jpg|Forward drive extension tread side plate | ||
| + | </gallery> | ||
<br /> | <br /> | ||
Latest revision as of 04:44, 4 December 2015
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 19-October-2015 | 6:00-9:00 PM | TCHS Brandywine | Josh, Akhila, Braden, Bennett, Seth, Trent, Daniel, Wade, Myles, Amal, Jacob, Trevor |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans |
|---|---|
| Intake |
|
| Milling pieces |
|
| Tasks | Reflections |
|---|---|
| Programming |
|
Action and idea Journal
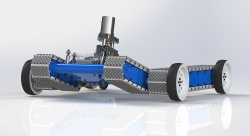
Drive base
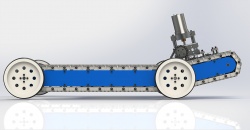
Drive base

First attempt at lift CAD

Bennet & Josh on mill

Daniel and Braden

Akhila & George Abersold


Seth & Clem McKown working on track system


Tread unit partially assembled




Tread unit assembled
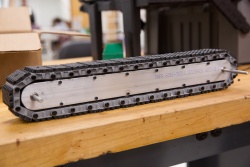
Tread unit assembled

Akhila

Tread unit with 4" wheels
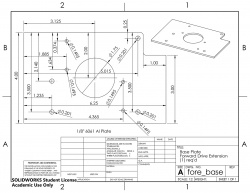
Forward drive extension base plate
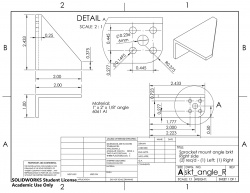
Right side sprocket mount for drive extension articulation
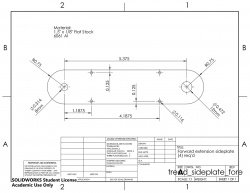
Forward drive extension tread side plate





















| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|