FTC 7314 Engineering Notebook 2015-10-19
From DEW Robotics
Revision as of 04:44, 4 December 2015 by Akhila2014 (talk | contribs) (→Competition Season Meeting)
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 19-October-2015 | 6:00-9:00 PM | TCHS Brandywine | Josh, Akhila, Braden, Bennett, Seth, Trent, Daniel, Wade, Myles, Amal, Jacob, Trevor |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans |
|---|---|
| Intake |
|
| Milling pieces |
|
| Tasks | Reflections |
|---|---|
| Programming |
|
Action and idea Journal
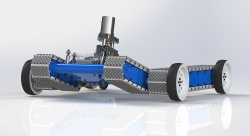
Drive base
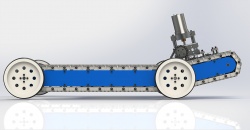
Drive base

First attempt at lift CAD

Bennet & Josh on mill

Daniel and Braden

Akhila & George Abersold


Seth & Clem McKown working on track system


Tread unit partially assembled




Tread unit assembled
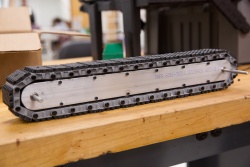
Tread unit assembled

Akhila

Tread unit with 4" wheels
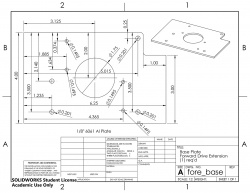
Forward drive extension base plate
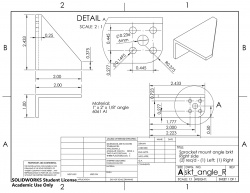
Right side sprocket mount for drive extension articulation
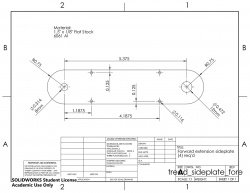
Forward drive extension tread side plate





















| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|