Difference between revisions of "FTC 7314 Engineering Notebook 2015-11-04"
From DEW Robotics
MaiKangWei (talk | contribs) (→Competition Season Meeting) |
MaiKangWei (talk | contribs) |
||
| (8 intermediate revisions by the same user not shown) | |||
| Line 17: | Line 17: | ||
!Objectives / Systems !! Hypotheses, tests, observations, conclusions, plans | !Objectives / Systems !! Hypotheses, tests, observations, conclusions, plans | ||
|- | |- | ||
| − | | ''' | + | | '''Complete Drive System''' |
| | | | ||
| − | * | + | * They replaced the (2) Tetrix drive motors with (2) am-2964a motors, thereby gaining integral encoders with the new motors. |
| − | + | * It is clear that the worm gear - output shaft connection on the forward drive extension elevation is prone to slippage. This connection is achieved via (2) small set screws on a 3/16" steel shaft. Frankly, this connection is not likely to be adequate or reliable. | |
| − | + | * Plan for the worm gear output is to purchase the tooling to enable us to replace the 3/16" output shaft with a 6mm shaft ant to use a 2mm key to fix the worm gear and shaft in rotation. Tools required are a 2mm end mill and a 2mm broach with 6mm bushing. | |
| − | |||
| − | * | ||
| − | |||
|} <!-- End of tasks table; DO NOT REMOVE --> | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
| Line 33: | Line 30: | ||
!Tasks !! Reflections | !Tasks !! Reflections | ||
|- | |- | ||
| − | | ''' | + | | '''Replace Tetrix Drive Motors with am-2964a's''' |
| − | |||
| − | |||
| − | |||
| − | |||
| | | | ||
| − | * | + | * Not a regular FTC Meeting. Josh is present. Working with mentor Gary Deaver. |
| − | + | * Driver for this work is the integral encoder in the AndyMark motors. Gear reduction is 40:1. | |
| + | * Had to cut shaft on right side drive motor to fit. No modification needed to left side motor. | ||
| + | * Spacers were relocated for fit. | ||
| + | * And a new platform cut. | ||
| + | * We used new (longer) spacers to support the platform. Old spacers reclaimed from FRC 1640 pivot modules. | ||
| + | * Temporarily used shcs's for the platform. Need to replace with fhsc's. | ||
|} <!-- End of tasks table; DO NOT REMOVE --> | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
== Action and idea Journal== | == Action and idea Journal== | ||
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
| − | image:ResQ_151104-1.jpg| | + | image:ResQ_151104.jpg|Rendered SolidWorks model showing climber dumper (for autonomous) |
| − | image: | + | image:FTC7314_151104-1.jpg|AndyMark drive motors in place |
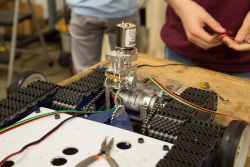
| − | image: | + | image:FTC7314_151104-2.jpg|Installing platform and elevation worm gear drive |
| − | image: | + | image:FTC7314_151104-3.jpg|Electrical panel in place |
| − | image: | + | image:FTC7314_151104-4.jpg| |
| − | image: | + | image:FTC7314_151104-5.jpg|Chassis weight right now (lb<sub>m</sub>) |
| − | + | image:FTC7314_151104-6.jpg|Robot weight-in | |
</gallery> | </gallery> | ||
Latest revision as of 00:33, 17 November 2015
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 4-November-2015 | 6:00-9:00pm | TCHS Brandywine | Josh |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans |
|---|---|
| Complete Drive System |
|
| Tasks | Reflections |
|---|---|
| Replace Tetrix Drive Motors with am-2964a's |
|
Action and idea Journal

Rendered SolidWorks model showing climber dumper (for autonomous)

AndyMark drive motors in place

Installing platform and elevation worm gear drive

Electrical panel in place

Chassis weight right now (lbm)

Robot weight-in







| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|