Difference between revisions of "FTC 7314 build September 2013"
MaiKangWei (talk | contribs) (→12-September) |
MaiKangWei (talk | contribs) (→12-September) |
||
| Line 17: | Line 17: | ||
Some observations made: | Some observations made: | ||
:* There are (4) clear pinch points on the field which will restrict movement. During tele-op scoring, robots will need to pass through these pinch points two times per scoring cycle. | :* There are (4) clear pinch points on the field which will restrict movement. During tele-op scoring, robots will need to pass through these pinch points two times per scoring cycle. | ||
| − | :* Defensive blocking of autonomous bridge scoring | + | :* Defensive blocking of autonomous bridge scoring will be straightforward. |
:* Autonomous block scoring, on the other hand, will be difficult to prevent via defense. | :* Autonomous block scoring, on the other hand, will be difficult to prevent via defense. | ||
:* But two alliance robots both trying to score in the IR Goal are likely to interfere with each other. | :* But two alliance robots both trying to score in the IR Goal are likely to interfere with each other. | ||
:* 24-28 Blocks will fit into each pendulum goal | :* 24-28 Blocks will fit into each pendulum goal | ||
:* When forced to extreme, the top of the baskets range from 27" to 7" above grade. | :* When forced to extreme, the top of the baskets range from 27" to 7" above grade. | ||
| + | |||
| + | Opinions: | ||
| + | :* We think that raising the flag should be fast. | ||
| + | ::* 3 sec was cited | ||
| + | ::* an ungeared Tetrix motor should be able to raise the flag in 7 sec | ||
| + | :* We think a robot might make 4-7 scoring cycles during tele-op. | ||
| + | ::* This would represent up to 16-28 blocks scored at 4 blocks/cycle | ||
| + | ::* or 48-84 points if scored on the outer pendulum goals | ||
| + | ::* plus 24-42 additional points if the pendulum is balanced | ||
==14-September== | ==14-September== | ||
Revision as of 14:36, 14 September 2013
8-September
Block Party! scoring model - Siri Maley
We spent a good part of the meeting going through rules and especially the scoring and tournament ranking rules. We proposed some mechanisms but did not really define what we want the robot to do when we play Block Party!
So, our mission for Thursday is to define what we want are robot to do to play Block Party! This will be our game Strategy. From this, we will set functional specifications (again, focused on what and not how). Figuring out how to do it is a job for another day.
12-September
The team developed a prioritized game strategy.
Some observations made:
- There are (4) clear pinch points on the field which will restrict movement. During tele-op scoring, robots will need to pass through these pinch points two times per scoring cycle.
- Defensive blocking of autonomous bridge scoring will be straightforward.
- Autonomous block scoring, on the other hand, will be difficult to prevent via defense.
- But two alliance robots both trying to score in the IR Goal are likely to interfere with each other.
- 24-28 Blocks will fit into each pendulum goal
- When forced to extreme, the top of the baskets range from 27" to 7" above grade.
Opinions:
- We think that raising the flag should be fast.
- 3 sec was cited
- an ungeared Tetrix motor should be able to raise the flag in 7 sec
- We think a robot might make 4-7 scoring cycles during tele-op.
- This would represent up to 16-28 blocks scored at 4 blocks/cycle
- or 48-84 points if scored on the outer pendulum goals
- plus 24-42 additional points if the pendulum is balanced
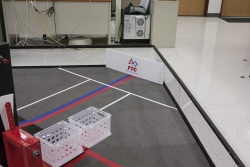
14-September
Block Party! Field Photo Gallery

Pendulum Goals & Bridge



Bridge & Pull-Up Bar

Flag Assembly

Flag Assembly

Bridge and

Pendulum Goal

Pendulum Goal - Outer goal at level

Pendulum Goal - Outer goal at level

Pendulum Goal - High side of High Outer goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - Low side of High Outer goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - Low side of High Inner goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - High side of Low Inner goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - High side of Low Outer goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - Low side of Low Outer goal with (8) Blocks in the low-side Outer Goal

(8) Blocks in the Outer Goal
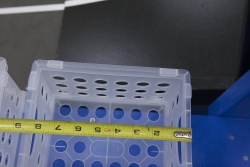
Pendulum Goal Basket

Elevation of Flag Crank
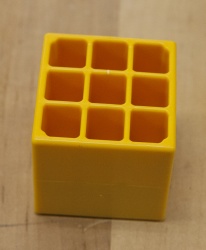
Block




















