FTC 7314 build September 2013
Contents
8-September
Block Party! scoring model - Siri Maley
We spent a good part of the meeting going through rules and especially the scoring and tournament ranking rules. We proposed some mechanisms but did not really define what we want the robot to do when we play Block Party!
So, our mission for Thursday is to define what we want are robot to do to play Block Party! This will be our game Strategy. From this, we will set functional specifications (again, focused on what and not how). Figuring out how to do it is a job for another day.
12-September
The team developed a prioritized game strategy.
Some observations made:
- There are (4) clear pinch points on the field which will restrict movement. During tele-op scoring, robots will need to pass through these pinch points two times per scoring cycle.
- Defensive blocking of autonomous bridge scoring will be straightforward.
- Autonomous block scoring, on the other hand, will be difficult to prevent via defense.
- But two alliance robots both trying to score in the IR Goal are likely to interfere with each other.
- 24-28 Blocks will fit into each pendulum goal
- When forced to extreme, the top of the baskets range from 27" to 7" above grade.
Opinions:
- We think that raising the flag should be fast.
- 3 sec was cited
- an ungeared Tetrix motor should be able to raise the flag in about 7 sec (assuming it's got the torque).
- We think a high-performance robot might make 4-7 scoring cycles during tele-op.
- This would represent up to 16-28 blocks scored at 4 blocks/cycle
- or 48-84 points if scored on the outer pendulum goals
- plus 24-42 additional points if the pendulum is balanced
- As mentioned above, blocking (purposeful and accidental) is likely to impact robots' ability to score in tele-op.
14-September
Reviewed Drive-trains, comparing tank drive with holonomic, mecanum, automobile and other drive strategies.
Also reviewed the function of the team's Drive-train mathematical model.
The team prototyped mechanisms in two different areas:
- Mechanisms for scooping up blacks from the floor; and
- a mechanism for raising the flag.
Present: Brad, Eric, CJ, Mentor/Coaches: Clem McKown, Gary Deaver & Andrew Weissman
Meeting start time: 2pm
- This was our second strategy meeting. We discussed the following:
- Point Scoring strategy
- Combinations that can earn us the most points
- What scores we can focus on
- Scoring mechanism
- How to build a Robot
- Robot Types
- Different wheels types: went through several pros and con for each wheel type
- Different drive trains
- This was our second strategy meeting. We discussed the following:
We then went to the FRC 1640 builders’ workshop station to trouble shoot plastic shapes for prototypes for the Containment device -raising the flag with the help of Mentor Gary Deaver. We came up with and made a football field structure. After which, we conducted several experimental trials fitting the fork edged plastic structure into the flag raising wheel. It was promising, but we still had to test for speed. Next we attached the plastic prototype football goal (fork like) structure to power drill. Eureka! Success!!! So we switch to an FRC battery to power the plastic fork and raised the flag and various speeds.
- At slow speed we achieved ~7 seconds
- At fast speed we achieved 3.2 seconds, but the flag post came apart
- We adjusted speed and achieved a full flag raise at ~7.0 seconds. The flag post was stable at ~7 seconds. This would theoretically allow us to earn 50 points.
Meeting ended at 5:00pm.
Brad, Eric, and CJ played air football for a few minutes to celebrate a successful meeting!









Brad with functional flag-raising prototype









19-September
With the Tetrix Resource Kit received, the team assembled its first chassis and successfully drove it.
The drive-train is 2-wheel-drive using Tetrix motors. Wheels are 4 inch. Driven wheels are directly driven (no gear reduction).
No controller yet. We just ran the motors from the 12V battery using a switch.
The chassis crosses the field diagonally over the bridge in 4 seconds. The diagonal is 165". Since the chassis is 16.5" long, the distance traveled is 165 - 16.5 = 148.5 in. Average speed is therefore 148.5 in / 4 s = 37 in/s (3.09 ft/s).

Brad assembling frame

CJ & Brad

Eric, Brad, CJ, Gary Deaver & John Weissman

Brad, CJ & Gary Deaver

Height of hanging bar from ramp

CJ
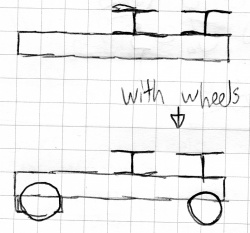
Chassis
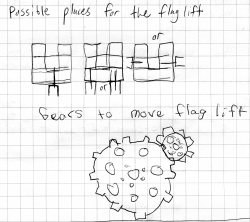
Flag lift








21-September

Programming lessons started.
26-September

The team worked on two prototypes during the meeting: an arm and a scoop collector for cubes.
The arm is a simple 1-axis arm with 3:1 reduction (120T:40T) from a single Tetrix motor.
28-September
The team build and tested a cube pick-up mechanism based on a beater-bar and a scoop. The initial scoop proved to be too shallow, allowing cubes to be kicked out by the beater bar, but this was modified and deepened.









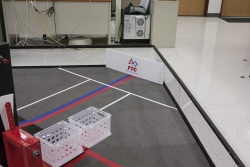
Block Party! Field Photo Gallery

Pendulum Goals & Bridge



Bridge & Pull-Up Bar

Flag Assembly

Flag Assembly

Bridge and

Pendulum Goal

Pendulum Goal - Outer goal at level

Pendulum Goal - Outer goal at level

Pendulum Goal - High side of High Outer goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - Low side of High Outer goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - Low side of High Inner goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - High side of Low Inner goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - High side of Low Outer goal with (8) Blocks in the low-side Outer Goal

Pendulum Goal - Low side of Low Outer goal with (8) Blocks in the low-side Outer Goal

(8) Blocks in the Outer Goal
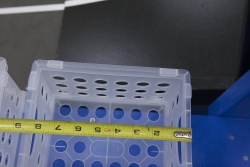
Pendulum Goal Basket

Elevation of Flag Crank
Block




















