Stronghold Meeting - 27-Jan-2016
From DEW Robotics
Contents
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| TCHS Brandywine |
CAD & Design
Continued work on chassis, design almost finalized, also prototyped intake arms
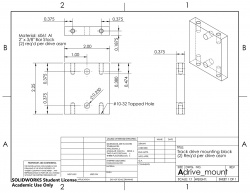
Mounting plate for tracked drive assembly ( pdf)
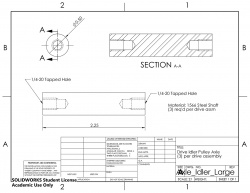
Axle for large track idler pulley ( pdf)
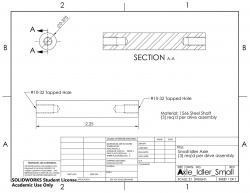
Axle for small track idler pulley ( pdf)



Mechanical
Pulleys and belts arrived. Also 6061 Al for the track drive plates.
work started on cutting drive axles and the drive mounting plates (based on drawings above).
Programming
- We decided to add some more features to the drive code.
- - The first was to change the sensitivity of the joystick. We could use a function to change the joystick inputs.
- - By changing the function, we could change where the joystick is sensitive. For example, a cubic would make medium and high values very sensitive, but the low values would have more control.
- - We tried many functions, such as cubic, sin, arctan, and x^5 - x^3.
- - We tested all of them, and decided the cubic or x^5 - x^3 would be best. We will give it to a drive tomorrow for further testing.
- - The second feature we added was to make the robot stop faster.
- - The driver had noticed that the robot continued going after he let go of the joystick. This was not because the motors were being powered, it was due to the wheels slipping.
- - We hypothesized by accounting for the inertia of the robot, we could remove this drift.
- - Using the change in joystick (or acceleration of the robot), we could add or remove a little to the joystick value. This would account for the acceleration of the robot, making it stop faster.
- - After writing and testing this code, we gave it to a driver to test. He immediately noted that he liked this version much better, as it stopped much quicker.
- - At the moment, this code only applies to the turn, however tomorrow we hope to add it to the forward / back as well.
- - We attempted to run both features together, however it seemed that they needed to be tuned a bit more in order to work together.
Strategy
Field Elements
Other
| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|