Difference between revisions of "Talk:DEWBOT VI Monty Madness"
MaiKangWei (talk | contribs) (→17-May-2010) |
MaiKangWei (talk | contribs) (→17-May-2010) |
||
| Line 29: | Line 29: | ||
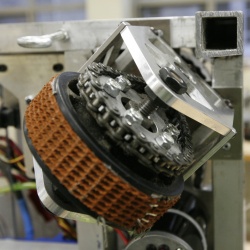
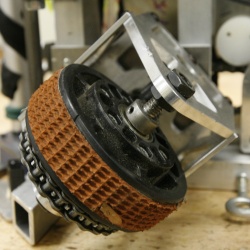
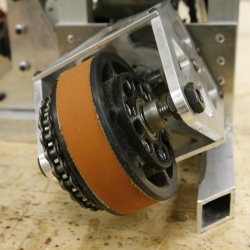
Gary Deaver replaced wheel treads and upgraded these to the "Dreaver" system. The tread on wheel 1 (Right Rear - also the only "Deaver Attachment" wheel at Monty) was polished smooth (but still securely on the wheel). See wheel photos below. | Gary Deaver replaced wheel treads and upgraded these to the "Dreaver" system. The tread on wheel 1 (Right Rear - also the only "Deaver Attachment" wheel at Monty) was polished smooth (but still securely on the wheel). See wheel photos below. | ||
| − | <gallery widths=250 heights=250 perrow=3 | + | <gallery widths=250 heights=250 perrow=2> |
| − | Image: | + | Image:DB6_wheel_3_100517_csm.jpg|Wheel 3 |
| + | Image:DB6_wheel_2_100517_csm.jpg|Wheel 2 | ||
| + | Image:DB6_wheel_4_100517_csm.jpg|Wheel 4 | ||
| + | Image:DB6_wheel_1_100517_csm.jpg|Wheel 1 | ||
</gallery> | </gallery> | ||
Revision as of 23:50, 21 May 2010
Possessor
Sab-BOT-age has struggled over the possessor, without being able an effective device.
I would like to explore a completely different approach. Team 103 Cybersonics has an effective vacuum-type possessor. There are two units, left and right, allowing space for a central kicker. Vacuum is provided by two axial 3-blade propellers (L&R) each driven by an ungeared FisherPrice motor. Two rollers (L&R) within the vacuum plenum contact the ball, allowing it to roll on the floor while in possession.
With this possessor, we would not need such a wide kicker. It could be cut down.
A drawback is the need to position the ball into the central possessor by driving. Our current possessor does not center (or possess), but allows accurate kicking over a wide portion of the robot's width.
I will work first in Inventor to develop this concept for DEWBOT VI.
Mirror
Suggest we install a polymer mirror on the robot front to help us see and therefore clear balls hiding behind the bumps. We need to test the concept this week. I'll arrange materials & time.
Autonomous
Drive-train
Erratic drive-train behavior plagued us at Monty Madness. Appears to be a new problem. Cause?
Human Interface
Paul has added new drive capabilities, but these are underutilized (or unutilized) by the driver. Why?
- not useful capabilities?
- difficult (non-intuitive) control?
- inadequate training?
- complaicent driver?
- do I really need to buy an X-Box?
17-May-2010
Gary Deaver replaced wheel treads and upgraded these to the "Dreaver" system. The tread on wheel 1 (Right Rear - also the only "Deaver Attachment" wheel at Monty) was polished smooth (but still securely on the wheel). See wheel photos below.

Wheel 3
Wheel 2
Wheel 4
Wheel 1




Charged battery #1 with an old charger for testing.