FTC 7314 Engineering Notebook 2014-11-08
From DEW Robotics
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| Saturday, November 8, 2014 | 2pm-5pm | TCHS Brandywine | Nick, CJ, Justin, Braden, Akhila, Laura, Eric |
| Tasks | Reflections |
|---|---|
| Programming |
|
| Test Driving |
|
| Building Bapper |
|
| Recorded by: | Date: | Journal Editor: Akhila | Date: 11/29/14 |
|---|---|---|---|
Action and idea Journal

CAD rendering showing goal capture
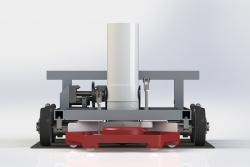
CAD rendering showing goal capture from aft


| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|