Difference between revisions of "Team 1640 2009 Summer Program"
MaiKangWei (talk | contribs) (→11 & 12 August Meetings) |
MaiKangWei (talk | contribs) (→Summer Program Gallery) |
||
| (12 intermediate revisions by the same user not shown) | |||
| Line 3: | Line 3: | ||
The FRC team will be working on our summer projects to develop new knowledge through prototyping and testing. | The FRC team will be working on our summer projects to develop new knowledge through prototyping and testing. | ||
| − | ==23 June Meeting== | + | ==23 June Meeting - ''Goal Setting''== |
The team's missions for this summer were agreed upon: | The team's missions for this summer were agreed upon: | ||
| − | #Prototype and test a 4- | + | #Prototype and test a [[4-Wheel Pivot Drive]] chassis. |
##Prototype should allow multi-mode drive: | ##Prototype should allow multi-mode drive: | ||
###Tank - Tank wheels on each side are parallel | ###Tank - Tank wheels on each side are parallel | ||
| Line 78: | Line 78: | ||
Great progress on a technically challenging project, but work to do yet. | Great progress on a technically challenging project, but work to do yet. | ||
| + | |||
| + | ==18 & 19 August Meetings== | ||
| + | |||
| + | Paul (on vacation) & Kenneth have been working hard together on the code. | ||
| + | |||
| + | Crab Mode works. A few small quirks, but basically solid. | ||
| + | |||
| + | Kenneth updated the Automobile & Snake setpoints logic so that the pivot angles are correct (with the inside-of-turn wheels pivoting more than the outside-of turn). | ||
| + | |||
| + | Wonderful progress on a challenging project. The prototype drives beautifully. | ||
==Summer Program Gallery== | ==Summer Program Gallery== | ||
| Line 101: | Line 111: | ||
Image:2009_Summer_Pivot_Paul_Praveen_090805_csm.jpg|Paul & Praveen | Image:2009_Summer_Pivot_Paul_Praveen_090805_csm.jpg|Paul & Praveen | ||
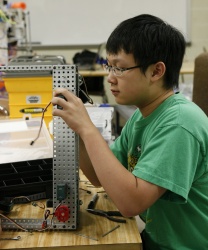
Image:2009_Summer_Pivot_Paul_programming_090811_csm.jpg|Paul Programming the Pivot Prototype | Image:2009_Summer_Pivot_Paul_programming_090811_csm.jpg|Paul Programming the Pivot Prototype | ||
| − | Image: | + | Image:2009_Summer_Pivot_Kenneth_Paul_programming_090812_csm.jpg|Kenneth & Paul programming |
| − | Image:2009_Summer_Pivot_Melanie & | + | Image:2009_Summer_Pivot_Melanie & Carly_090812_csm.jpg|Melanie & Carly working on media |
| − | Image: | + | Image:2009_Summer_Pivot_Kenneth_Paul_Ben_090812_csm.jpg|Kenneth, Paul & Ben |
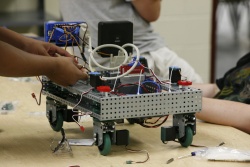
| − | Image: | + | Image:2009_Summer_Pivot_driving_snake_090812_csm.jpg|Prototype driving in Snake Mode |
| − | Image: | + | Image:2009_Summer_Pivot_Ben_Kenneth_Paul_McKown_driving_090812_csm.jpg|Ben, Kenneth (driving), Paul, Clem McKown |
| + | Image:2009_Summer_Pivot_crab_090819_csm.jpg|Prototype wheels in Crab Drive | ||
| + | Image:2009_Summer_Pivot_Praveen_&_Kenneth_090819_csm.jpg|Praveen watches Kenneth work through the LabView control code | ||
| + | Image:2009_Summer_Pivot_crab_drive_090819_csm.jpg|Test drive - Crab Mode | ||
| + | Image:2009_Summer_Pivot_test_drive_090819_csm.jpg|Test drive | ||
| + | Image:2009_Summer_Pivot_crab_mode_090826_csm.jpg|Crab Mode | ||
| + | Image:2009_Summer_Pivot_programming_team_090826_csm.jpg|Programming Team | ||
</gallery> | </gallery> | ||
| Line 111: | Line 127: | ||
---- | ---- | ||
Catch up on other team information at [[FRC Team 1640]] | Catch up on other team information at [[FRC Team 1640]] | ||
| − | [[Category:Robot]][[Category:DEWBOT V]] | + | [[Category:Robot]][[Category:DEWBOT V]][[Category:DEWBOT VI]][[Category:Drive-train]][[Category:Summer Program]][[Category:Photo Galleries]][[Category:Swerve Drive]][[Category:Projects]] |
Latest revision as of 04:08, 29 October 2015
In order that we continue to develop knowledge and skills, Team 1640 is again engaging in a Summer program in 2009. We will meet Tuesday evenings from 6:30 to 8:30 pm at the Downingtown Educational Center starting 23-June through 18-August. We will be meeting in the shop area.
The FRC team will be working on our summer projects to develop new knowledge through prototyping and testing.
Contents
23 June Meeting - Goal Setting
The team's missions for this summer were agreed upon:
- Prototype and test a 4-Wheel Pivot Drive chassis.
- Prototype should allow multi-mode drive:
- Tank - Tank wheels on each side are parallel
- Crab - Crab wheels pairs (front and rear) turn the same direction
- Snake - Snake wheel pairs (front and rear) turn in opposite directions
- Target a ½-scale prototype using Vex parts and follow-through with a hypothetical Autodesk Inventor chassis design in FRC-scale. (12*18" actual size)
- Prototype should allow multi-mode drive:
- Engage in a literature and paper study of arm, gripper and lift systems
In addition:
- Paul K has a Vision control mission.
- Alex H has agreed to learn Inventor.
7 July Meeting

We started building our prototype (for real) at this meeting.
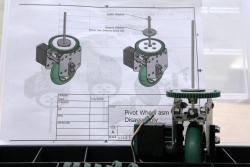
Here are the drawings for fabrication & assembly (pdf format):
At this meeting we:
- Collected the parts we will need
- Identified parts (just a few) which need to be ordered
- Cut all of the metal parts which need cutting
- Started assembling the Pivot Wheel Units
14 & 15 July Meetings
Kenneth joined the team! Welcome.
By popular demand, we are meeting Tuesday and Wednesday evenings.
At these meetings we:
- Built all of the Pivot Wheels Units
- Built the basic frame
- attached the first Pivot Wheel Unit
- Performed some gearbox repair on DEWBOT V
- Replaced missing pneumatic parts from DEWBOT III
21 & 22 July Meetings
Progress:
- Installed all Pivot Wheel Units
- Installed all Pivot Wheel Steering Gears & Drives
- Installed cRIO and Digital Sidecar
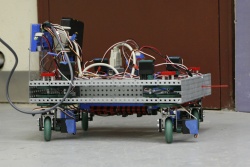
- The Prototype is Mechanically Complete
28 & 29 July Meetings
We're (mostly) wired. We made something move (with a motor)!
4 & 5 August Meetings
It's programming time. 'Nuf said.
Posted 9-Aug as a programming tool for Pivot-Wheel:
- Programming a Pivot Drive Robot.
- Pivot Worksheet - based on 0-5vdc Potentiometer Output.
- Pivot Worksheet - based on 0-1024 Potentiometer Output.
11 & 12 August Meetings
Prototype drives in Automobile & Snake Modes.
Carly officially approves of Snake.
We still have some work to do to get this working correctly. Plus there's the whole issue of drive orientation.
Great progress on a technically challenging project, but work to do yet.
18 & 19 August Meetings
Paul (on vacation) & Kenneth have been working hard together on the code.
Crab Mode works. A few small quirks, but basically solid.
Kenneth updated the Automobile & Snake setpoints logic so that the pivot angles are correct (with the inside-of-turn wheels pivoting more than the outside-of turn).
Wonderful progress on a challenging project. The prototype drives beautifully.
Summer Program Gallery

Carly & Paul work on vision project

Matt builds the prototype's pivot units
We design then we build...

...and we build what we design

Kenneth & Alex

Kenneth

Matt & Kenneth
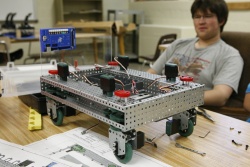
Mechanical Completion
wiring prototype

Praveen, Matt & Alex

Paul & Kenneth programming
wiring prototype

Melanie collects recruitment poster ideas

Kenneth & Paul programming

Paul working on Pivot Prototype program


Paul & Praveen
Paul Programming the Pivot Prototype

Kenneth & Paul programming

Melanie & Carly working on media

Kenneth, Paul & Ben
Prototype driving in Snake Mode

Ben, Kenneth (driving), Paul, Clem McKown
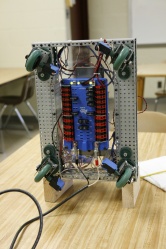
Prototype wheels in Crab Drive

Praveen watches Kenneth work through the LabView control code

Test drive - Crab Mode

Test drive
Crab Mode

Programming Team






























Catch up on other team information at FRC Team 1640