|
|
| Line 12: |
Line 12: |
| | | | |
| | <br /> | | <br /> |
| − | == Action and idea Journal==
| |
| − | <gallery widths=250 heights=250 perrow=3>
| |
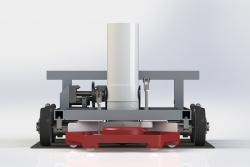
| − | image:FTC7314-141109.jpg|CAD rendering showing goal capture
| |
| − | image:FTC7314-141109b.jpg|CAD rendering showing goal capture from aft
| |
| − | </gallery>
| |
| − | <br />
| |
| − |
| |
| | | | |
| | <!-- This is Tasks and Reflections table --> | | <!-- This is Tasks and Reflections table --> |
| Line 49: |
Line 42: |
| | | | |
| | |} <!-- End of tasks table; DO NOT REMOVE --> | | |} <!-- End of tasks table; DO NOT REMOVE --> |
| − | | + | == Action and idea Journal== |
| | + | <gallery widths=250 heights=250 perrow=3> |
| | + | image:FTC7314-141109.jpg|CAD rendering showing goal capture |
| | + | image:FTC7314-141109b.jpg|CAD rendering showing goal capture from aft |
| | + | </gallery> |
| | <br /> | | <br /> |
| | | | |
| Tasks |
Reflections
|
| Programming
|
- Since Akhila's computer was not generating code at Ramp Riot, it was decided that the best idea would be to get to the root of the problem.
- To do this, mentor Julie and Akhila created an entirely new project and software configuration.
- The schematic was wired again, and the teleop code generated this time!
- They decided to configure the autonomous code as well, and that worked as well!
- Along the way, Akhila learned different aspect of learning to code with LabVIEW.
- The computer was also used to drive the robot, but the code had to be regenerated due to connection problems with the NXT.
- Unfortunately, the code would not generate.
- Until they find a real solution to the problem, the conclusion was made that the computer has a one-generation-per-day policy.
|
| Test Driving
|
- CJ and Eric worked on test driving the robot to figure out a way to bring down the kick stand and test the wheels after adjusting the motor. The robot had trouble connecting and the bluetooth was a bit slow when reacting to what they did on the controller. The kick stand could not be brought down but a top priorty for the next meeting is finding a way to bring down the kick stand quickly and consistantly. Eric while on the snack break learned how to set up the drive station for when the team practices driving.
|
| Building Bapper
|
- Laura, Nick, and some mentors discussed the plan for creating a shooter mechanism for the Dec 6th qualifier. We decided to move forward with the bapper, or whacker, design.
- We started to cut out pieces of acrylic for the official bapper. The design would include 2 one way bearings, and 1 one way bearing.
- After cutting the acrylic to size, and cutting a hole in the middle with a forstner drill bit, we started to press the bearings into place.
- Immediately after starting to press the bearings, the acrylic snapped in half. We learned our lesson. Never use acrylic. It is way to brittle for a robot.
- By the end of the meeting, we had a bapper with the bearings in place.
|