DEWBOT IV Lift-Catapult

A combination Fork-Lift-Catapult was designed for scoring. This lift was designed to:
- Start a match within the 28" x 38" x 60" envelope
- When deployed, never extend beyond 80"
- Knock Trackballs off the Overpass by driving directly underneath
- Pick Trackballs off the playing field
- Automatically capture Trackballs
- Possess Trackballs
- Hurdle Trackballs over the Overpass via the catapult
- Place Trackballs on the Overpass at the match end for bonus points
Contents
Articulation
The Fork-Lift-Catapult required three separate articulations:
- Fork - The Fork angle had to pivot to (3) discreet positions
- Lift - Fork height had to vary from about 2" to 76" from the playing surface
- Catapult - Two positions needed: armed and fired
Fork
The Fork itself needed to be as wide as possible (to securely cradle the Trackball) and needed to articulate to (3) discreet angles: 1) horizontal to capture Trackballs (and release them); 2) 20° raised to securely possess the Trackball; and 3) As close to 90° as practical (which turned out to be 70°) raised to fit within the starting envelope. Since pneumatics are a good choice when 1 or 2 discreet are required, pneumatics were selected to control the Fork angle. As three positions were needed, a pair of 3/4" diameter cylinders (one each 1½" and 8" stroke) were mounted on each side of the Fork mechanism. With both extended, the Fork was horizontal. Retracting the 1½"-stroke cylinder raised the angle to 20°. Retracting both brought the Fork to 70°. The Fork assembly was made from 80/20 1010 and 1020 profile and cut aluminum plate.
Lift
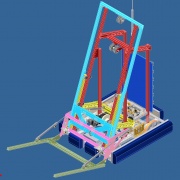
A double-extension Lift was required to allow the Robot to both fit within the starting envelope and to reach a height sufficient to place the Trackball back onto the overpass. The two moving element of the lift were the Fork "truck" and a Mid-Frame. The Mid-Frame incorporates the Catapult. In addition, there is a Fixed-Frame on which the Mid-Frame rides. Due to the need for maximum width on the Fork, the elements Fork, Fork Truck, Mid-Frame and Fixed-Frame are nested, from outside to in, like a Russian Doll. This nesting is shown in the sequence of CAD images below. False colors have been applied to each of the articulating assemblies for clarity.
- Fixed-Frame - red
- Mid-Frame - yellow
- Catapult - cyan
- Fork Truck - light magenta
- Fork - olive

1 - Fixed-Frame

2 - Mid-Frame

3 - Catapult

4 - Fork Truck

5 - Fork





The Lift frame is primarily constructed of 80/20 1010 extrusion, with other elements as required. 80/20 Roller Wheel & Bracket assemblies (Part #2751) was used to guide the linear motion. (4) Roller Wheel & Brackets were attached to the Fork Truck. (6) were attached to the Mid-Frame. Note: 80/20 Part 2751 Roller Wheel and Bracket Assemblies are both strong and reliable, but allowances need to be made for maintenance. Bolts securing the Roller Wheels to the Brackets and Brackets to their mounting points need to have their heads accessible for tightening. Such tightening must be regular and a scheduled maintenance / pit activity.
The Lift is cable-driven. Two cables provide positive up and down drive. One cable drives up, the other down. Cables are driven by a common 2-spool captstain powered by a FisherPrice Motor with FisherPrice Gearbox.
An Optical Encoder on the Capstain shaft, in conjunction with a low-level limit switch, provides the controller with accurate Lift height information.
Lift cables were run on (6) pulleys ((3) per cable). Pulleys were so positioned so that there was no need for a cable tensioner. A key here was to position pulleys co-axial to the Catapult axis.
Catapult
The Catapult frame is joined to the Mid-Frame via a pivoting connection. Below this pivoting connection, the two are linked via a pair of 3/4" x 6"-stroke pneumatic cylinders and a pair of parallel tension springs. Cylinders and springs provide the catapult force.
Pneumatics are set up so that the catapult retraction (from any state to armed) is slow, whereas release (from armed to hurdle) is very fast.
Mechanically, the catapult may only be operated when the bottom of the Fork Truck is higher than the top of the Fixed-Frame. Practically, the Lift height should be such as to catapult the Trackball over the Overpass while the Robot remains entirely under the Overpass.
Control Strategy

Very early in our design process, we identified (8) key "modes" for the Fork-Lift-Catapult.
While air cylinders actuate the Fork and Catapult, a motorized winch controls the Lift elevation. The winch has a double spool with opposing winding and so pulls the Lift both up and down via a cable and pulley arrangement. This arrangement allows us to enjoy the elevation range of a double extension Lift while using only a single drive source and control. Lift elevation is controlled via PID (Proportional, Integral & Derivative) control using an encoder on the Winch drive shaft. A limit switch at the bottom of the lift travel zeros the encoder count. There is also a limit switch at the top of travel for safety.
Five relays (spikes) are employed to operate the pneumatic system. One operates the compressor based on input from the pressure switch. The other four each operate one solenoid valve. Three of these solenoids actuate the Fork and Catapult system, while the last is used to shift the transmissions.
(8) buttons were mounted on the operating panel, allowing the Operator to select each mode. In addition, when in "Catch" mode, a sonar signal would automatically trigger a change to "Capture" when the Trackball was in position between the forks. Manual control of the lift was also possible (but not practical).
A restrictor valve in one exhaust port of the catapult solenoid provides asymmetric operating rates. As a result, we can “Arm” the catapult slowly (so that we don’t lose the Trackball) and fire it quickly.
The robot configuration in each of the (8) modes is shown below. False colors are again used to clarify articulated assemblies.
- Park - Starting position - fits in starting envelope
- Catch
- Capture
- Possess
- Armed
- Hurdle - Also position for knocking Trackballs off the Overpass
- Prepare-to-Place (P2P)
- Place

1 - Park

2 - Catch
3 - Capture

4 - Possess

5 - Armed

6 - Hurdle

7 - Prepare-to-Place

8 - Place








Strengths
- Easy to Operate
- Does everything (Performs every scoring function)
- Hurdle on the fly nice in principle
- Placed Trackballs back on the Overpass reliably
Weaknesses
- Poor steering made the Fork-Lift-Catapult difficult to use in practice - we were not a high scorer
- Trackball not secured when possessed - easy to lose in collision or sudden turn
- Fork articulation Cylinder rods (¼" diam) took the force of head-on collisions. Since we could not steer adequately, there were a lot of these collisions. We broke a lot of cylinders (always by breaking the rods).
- 20° back tilt on the lift meant that the robot center-of-mass shifted up and back in the higher lift positions. This improved steering in these higher positions (because it weighted the rear drive wheels), but it also made the robot prone to wheelies.
- P2P to Place timing was critical. Same for Armed-to-Hurdle. Training & confidence needed.
- Knocking Trackballs off the Overpass required both speed (high-gear necessary) and accurate steering. Since our steering was inaccurate, our ability to knock off Trackballs was limited.
- Some maintenance points could have been better thought out (but Fork-Lift-Catapult maintenance was not a serious maintenance issue)
Overall Critique
- Our biggest problem was the drive-train.
- Excluding the drive-train issues, the principle problem with the Fork-Lift-Catapult was the fact that Trackballs were not adequately secured and were therefore too easily lost.