DEWBOT XII Portcullis Lift
During our strategy development, we determined that DEWBOT XII needed to be able to go through the Portcullis & Cheval de Frise, both in teleop and autonomous. The Portcullis Lift is the mechanical device enabling this.
This mechanism was also pressed into service as the robot's camera and ring-light mount.
Contents
Portcullis Lift Objectives
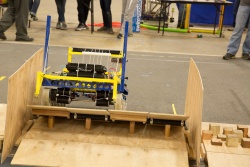
- Raise the Portcullis and allow the robot to pass through
- Lower two sections of the Cheval de Frise, allowing the robot to cross over
- Perform these operations in either autonomous or teleop mode
- Perform crossing in such a way as to support scoring in high goal during autonomous
Portcullis Lift Specifications
- Raise the Portcullis - allowing crossing
- Lower (2) raised Cheval de Frise sections - allowing crossing
- Robot must cross Portcullis & Cheval de Frise facing forward (in the direction of shooting)
- Mechanism cannot extend beyond 15 inches from the frame perimeter
- Must be easy for driver to use
Design Considerations
Consideration was made in consolidating intake and Portcullis Lift functions into a single mechanism. However, the team's desire to cross these obstacles moving forward while also picking up boulders while driving backwards (to avoid the need for turning around while cycling for boulders) prevented such consolidation.
Two working surfaces are needed: one to raise the Portcullis; the second to lower the Cheval de Frise.
The Cheval de Frise requires action on two elements separated by over 12 inches distance. In addition, Cheval de Frise contact is dynamic: either rolling or sliding.
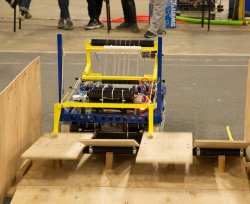
A double arm mechanism was employed, with a single cross-bar linking the two arms. The robot-side of each arm provides a pivot point and the opposite end provides the working surfaces. One 1-1/16" bore x 8" stroke double-acting pneumatic cylinder drives each of the two arms.
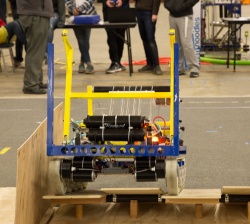
There are two working surfaces: an "L" shaped shelf to engage the bottom of the Portcullis and a pair of ball bearing races to provide a rolling surface to engage the top of the Cheval de Frise. A photograph showing both working surfaces is included in the gallery below.
Drawings

Experience & Post-Design Modifications
Immediate modifications were the addition of latex elastics to assist the raising of the Portcullis Arm and camera mounts.
No modifications were made to the original mechanism from Bagging through FRC Championship.
The first bit of experience with the Portcullis at Hatboro-Horsham showed us that the real Portcullis behaved very differently from the team's practice Portcullis; and that the real Portcullis was a lot easier to raise and traverse. This great performance difference slowed the development of out autonomous Portcullis routine (as it could only be realistically tested at competitions).
In retrospect, the connections between the arms and the cross bar should have been braced by gusset. None was added. These welds failed on Deux (and were patched together) but not on Prime.
A number of design changes were envisioned which could have reduced weight or improved ease of use. None was pursued. The original mechanism turns out to have performed acceptably.
The Portcullis Lift was used only in Teleop at Hatboro-Horsham, performing well on both the Portcullis and Cheval de Frise. Autonomous crossing of the Cheval de Frise was added at Seneca. Autonomous crossing of the Portcullis was introduced at FRC Championship, with successful high shooting following the crossing.
New Manufacturing Techniques
The gussets and cylinder mounting brackets for the Portcullis Lift (and many other small plate parts for the 2016 robot) were milled on a CNC router. The CNC router was of enormous assistance in improving work flow, as it freed the Mill for form on larger parts. In the past, a lot of Mill time was used to produce gussets and other small plate parts, or we accepted saw-cut parts.
Photographs






Photogragh showing both working surfaces: the "L" shaped shelf to engage the bottom of the Portcullis and a pair of ball bearing races to provide a rolling surface to engage the top of the Cheval de Frise.