FTC 7314 Engineering Notebook 2015-10-31
From DEW Robotics
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 31-October-2015 | 2:00-5:00 PM | TCHS Brandywine | Trevor, Daniel, Braden, Seth, Akhila, Amal, Bennett, Matt, Trent, Myles, Justin, Wade |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans |
|---|---|
| Cutting |
|
| Programming |
|
| Tasks | Reflections |
|---|---|
| Drive Chain |
|
| Programming |
|
Action and idea Journal

Painted chassis parts

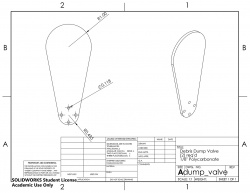
Calculations for the Tetrix debris lift belt. Note that the idler is a different size from the drive sprocket and has a non-integer "tooth" value (calculated herein).

Rendered CAD model - rear quarter view

Rendered CAD model - front quarter view
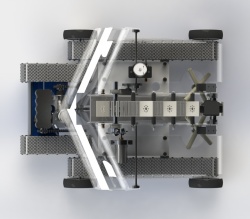
Rendered CAD model - plan view
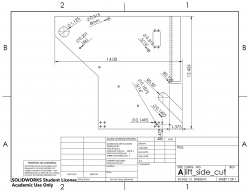
polycarbonate cutting pattern
polycarbonate cutting pattern
polycarbonate cutting drawing
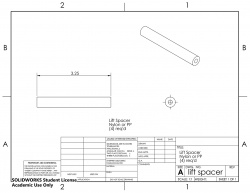
Fabrication drawing - Lift Spacer
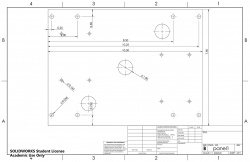
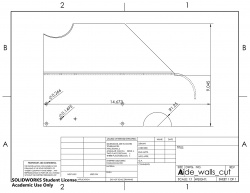
Fabrication drawing - Polypropylene panel

Assembling the tread system

Bennett assembles the tread drive train

Myles cuts parts using "paper dolls" - a flashback picture.
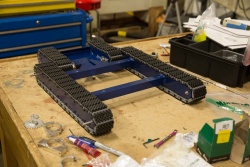
Tread drive base

Tread drive base

Treads and wheels...
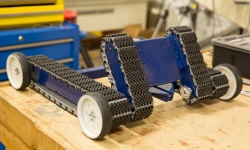
...what are we thinking?
















{kind=link}
| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|