Twitch
Twitch or Biaxial Drive
FRC 1565 Think Tank Tech in Cambridge, Ontario created a biaxial drive (which they called "Linkage-drive" and the robot "Twitch") for the 2008 (Overdrive) season. Videos showed good mobility and speed (albeit using omni wheels). This drive was one of the canidate drives to prototype.
The drawings below show our hypothetical chassis design basen on "Twitch" concept.
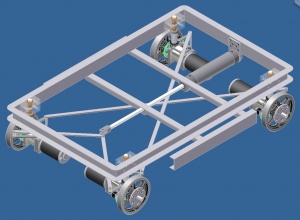
Twitch - x drive
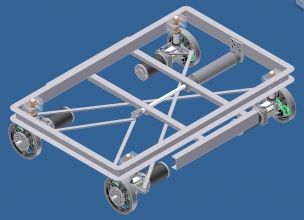
Twitch - y drive


Some principle points:
- The design employed 6" KitBOT wheels.
- Each wheel is independently driven by a CIM motor with a Bainbots 2-stage 12:1 reduction planetary gearbox.
- (4) wheel independent suspension is provided
- Chassis weight (as shown above) is 42.4 lb
- Platform for scoring systems is wide open, but relatively high off the playing field. This could lead to high center-of-mass for the complete robot.
- Wheelbase is:
- x-drive: 29.7" (long) x 22.9" (wide)
- y-drive: 19.8" (long) x 32.8" (wide)
- Drive orientation is changed pneumatically, so the robot requires a pneumatic system with compressor & storage
- There are provisions for encoders on all wheels
View the Microsoft Excel BoM
VEX Prototype
In the summer of 2008 we built a ½-scale prototype version of the linkage drive. Each wheel had a direct drive motor. The twitch action was performed by rack/pinion gear set up (in lieu of pneumatic cylinder). It took about five second to do a full cycle. The Twitch Software was set up to be arcade drive on the right joystick, the left joystick controlled the twitch function. The software allowed the driver to pick the "virtual" front of the robot.
In the pictures below you can see the cycle take place.
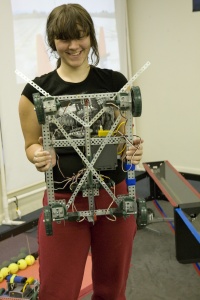
Twitch wheels in N/S (x) position

Wheels 1/2 through the travel
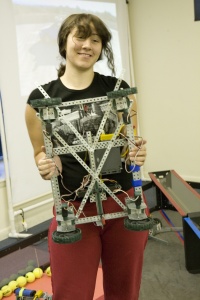
Twitch wheels in E/W (y) position



The capability to pick any of the (4) robot sides as the front was viewed as a very positive feature. Always drive forward. If we implemented this on FRC-scale, we would use different colored bumpers for each side, and use the same colors on the user interface for intuitive control.
In testing the prototype, we learned that it maneuvered well in the y-orientation, but poorly in the x-orientation.
Despite x-orientation steering problems, the robot is very agile.
2008 Drive-train Development