Difference between revisions of "DEWBOT VI proxy chassis"
MaiKangWei (talk | contribs) |
MaiKangWei (talk | contribs) |
||
| Line 7: | Line 7: | ||
Image:DB6 Siri welding proxy chassis 100207 csm.jpg|Siri welding the ''proxy chassis'' (just before the welder broke) | Image:DB6 Siri welding proxy chassis 100207 csm.jpg|Siri welding the ''proxy chassis'' (just before the welder broke) | ||
image:DB6 Matt welding 100208 csm.jpg|Matt completing the ''proxy chassis'' welding | image:DB6 Matt welding 100208 csm.jpg|Matt completing the ''proxy chassis'' welding | ||
| − | image:DB6_Matt_Clema_proxy_smw_20100208_0064.JPG|Matt and Clem McKown working on Proxy Chassis. | + | image:DB6_Matt_Clema_proxy_smw_20100208_0064.JPG|Matt and Clem McKown working on Proxy Chassis |
| + | image:DB6_Cole_Siri_Jen_kicker_100213_csm.jpg|Cole, Siri & Jen installing the kicker on the ''proxy chassis'' | ||
Image:DB6_Deaver_Matt_riveting_tool_steel_plate_100216_csm.jpg|Gary Deaver and Matt riveting on the tool steel plate | Image:DB6_Deaver_Matt_riveting_tool_steel_plate_100216_csm.jpg|Gary Deaver and Matt riveting on the tool steel plate | ||
Image:DB6_Douglas_Rizzo_Moyer_100216_csm.jpg|Douglas, Mike Rizzo and David Moyer working out the kicker problems | Image:DB6_Douglas_Rizzo_Moyer_100216_csm.jpg|Douglas, Mike Rizzo and David Moyer working out the kicker problems | ||
Revision as of 00:00, 26 February 2010
During the 2010 Build Season, Team 1640 designed and fabricated a proxy chassis as a time-management tool. The proxy chassis duplicated the key geometry and construction of the forward portion of the robot chassis, focusing on accurately duplicating every chassis element which would or could interact with the Kicker.
The proxy chassis enabled us to turn a mechanically and electrically functional robot chassis over to the Programming and Field sub-teams to allow them time to work uninterrupted, while the mechanical sub-team focused on making the Kicker system as functional and reliable as possible. This was very successful.
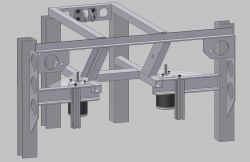
Proxy Chassis

Siri welding the proxy chassis (just before the welder broke)

Matt completing the proxy chassis welding

Matt and Clem McKown working on Proxy Chassis

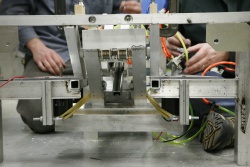
Cole, Siri & Jen installing the kicker on the proxy chassis

Gary Deaver and Matt riveting on the tool steel plate

Douglas, Mike Rizzo and David Moyer working out the kicker problems

Burning the (not yet) midnight oil

Kicker sequence 1/4 (fired) - Disarmed / Fired

Kicker sequence 2/4 - Cocked

Kicker sequence 3/4 - Latched
Kicker sequence 4/4 - Armed

The magical wire ties











_100216_csm.jpg)
