Difference between revisions of "DEWBOT XIII Shooter"
MaiKangWei (talk | contribs) (→Shooter) |
MaiKangWei (talk | contribs) (→Shooter) |
||
| Line 20: | Line 20: | ||
image:DB13_170117-6.jpg| | image:DB13_170117-6.jpg| | ||
image:DB13_170118-2.jpg| | image:DB13_170118-2.jpg| | ||
| − | image: | + | image:DB13_170118-5.jpg| |
image:DB13_170122-3.jpg| | image:DB13_170122-3.jpg| | ||
image:DB13_170122-5.jpg| | image:DB13_170122-5.jpg| | ||
Revision as of 22:24, 8 May 2017
It had been the team's intention and strategy for DEWBOT XIII to be a high-performance shooter (together with good rear running capabilities and a fast, reliable climb). Alas, we did not accomplish the critical shooting goal. Our shooter was definitely middling. While very consistent in its shooting and capable of shooting consistently at up to 6 balls/s, feed issues limited us to an average 2.5 balls/s. In addition, while shooter elevation and wheel speed are adjustable,we had a limited number of pre-set shooting solutions and limited objective data on which to base such solutions.
The Shooter System comprises several interacting components:
- Shooter
- Feeder
- Ball Pickup
- Hopper
Contents
Shooter

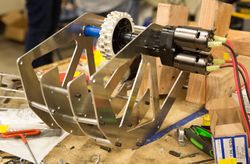
early prototype

next prototype


early CAD

Double shooter CAD
Aashay & Gary

CNC Router

Flywheel






CAD of duplex shooter

Shooter frame



CAD


CAD


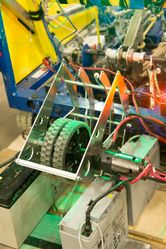


Shooter mounted

























