DEWBOT XIII Shooter
It had been the team's intention and strategy for DEWBOT XIII to be a high-performance shooter (together with good rear running capabilities and a fast, reliable climb). Alas, we did not accomplish the critical shooting goal. Our shooter was definitely middling. While very consistent in its shooting and capable of shooting consistently at up to 6 balls/s, feed issues limited us to an average 2.5 balls/s. In addition, while shooter elevation and wheel speed are adjustable,we had a limited number of pre-set shooting solutions and limited objective data on which to base such solutions.
The Shooter System comprises several interacting components:
- Shooter
- Feeder
- Ball Pickup
- Hopper
Contents
Shooter
The shooter is a basic single-wheel shooter. While simple, this mechanism went through an enormous amount of testing and development, including multiple prototypes, the last few being CNC-produced.
Some key learnings:
- A flywheel reduces the magnitude of speed reduction while shooting, but not recovery time
- More power reduces speed recovery time
- Holes in balls (fuel) interacting randomly with thin shooter rails randomly throw off ball trajectory
- 6 inch wheels provide more consistency than 4 inch
- 2 inch wide wheels provide more consistency than 1 inch wide
- Printed guides expanding the ball contact area from narrow rails to

early prototype

next prototype


early CAD with CIM drive

Double shooter CAD
Aashay & Gary

CNC Router

Flywheel






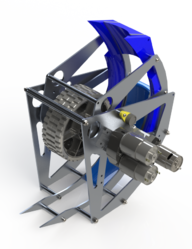
CAD of duplex shooter - now using 775 Pro motor w/ 3:1 reduction

Shooter frame



CAD showing early elevation adjustment hood

Shooter with double 775 Pro drive

CAD with revised elevation hood

14T drive gears for angle adjustment

84T gear being machined for shooter angle adjustment
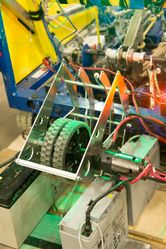
Shooter testing with 6 inch wheels

Half 84T gear for elevation adjustment

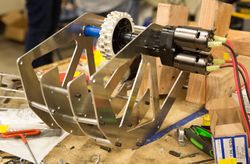
Shooter mounted
Shooter with printed guides in place

6 inch flywheel

3-motor shooter gearbox

3-motor shooter w/ 6" flywheel in deux





























