DEWBOT XVI Climber

Hanging requirements:
- Needs to be easy for drive team
- Must be capable of hanging in switch center
- Must be capable of hanging on raised area of switch
- Robot must remain up when disabled
- Robot needs to be easily removed from switch after match by two students
- Robot must be removed from field and returned to pit without needing power
- One motor may be used
- Climber must remain entirely below 28" height prior to deployment
When the Shooter Arm was under consideration, it was intended that the Climber would be incorporated into this system. With the Arm abandoned, the Climber became a stand-alone mechanism.
Contents
Strategy
Climbing is a Strategic Imperitive.
General Description
The Climber makes up a rectangular frame with the longitudinal elements made of 1½" x 1/16" 6061 Al square tubing and the transverse elements connecting these made from 1¾" x 1/8" 6061 Al U-Channel. The longitudinal elements contain extendable hooks driven synchronously via leadscrews. The rear U-Channel is highly relieved and incorporates the leadscrew drive. This rear U-Channel also terminates in ½" shaft for bearing mount, allowing the entire structure to rotate. The Climber deploys via this rotation, driven by a pair of 1¼" x 12" stroke pneumatic cylinders.
Extensions are composed of 1" OD x 0.028" wall x 28-5/8" long 4130 steel tubes with printed square linear bearings outside and bronze leadscrew nuts inside at the rear and ¼" 6061 Al hooks at the front.
Leadscrews have the significant advantage of not backdriving under load without power. At the same time, they are easily driven by hand in order to facilitate easy and safe removal of the robot from the switch after a match.
Leadscrew Drive
Leadscrews are driven by a single NEO motor mounted on a custom shifting gearbox. Gear reduction ratios are 1:1 (for rapid extension under low load) and 4:1 (for lifting the robot). Gear shifting is pneumatically actuated (¾" x ½" stroke) utilizing a 4-tooth Andymark dog. The gearbox has an encoder mounted on the output shaft.
The gearbox has two output shafts each with a 28t HTD5 pulley; one for the right side extension and the other for the left side. The two output shafts rotate in the same direction, allowing normal right-hand leadscrews to be used for both extensions. Power is transmitted from these to 28t HTD5 pulleys on each of the leadscrews using 9mm wide belts: 205t on the left; 52t on the right. The leadscrews can be driven by hand using the 205t belt.
A 3/8" shaft extends from the gearbox between the two output shafts, rotating in the opposite direction. This shaft allows a hand drill to be used to drive the leadscrews without robot power.
Leadscrews are 3/8"-10 2-start 4140 steel leadscrews with right-hand thread (McMaster-Carr 98940A012), each 30.5" long. Travel is 0.2 in/rev. Leadscrews have 3/32" keyways milled to engage the HTD5 drive pulleys. Leadscrew Nuts are matching round 932 bronze nuts (McMaster-Carr 1343K121) which are turned down from the original 1.344" OD to fit into the extension tube; also drilled and tapped 4x each for 6/32 screws.
Mounting & Support
The pivot point for the climber is necessarily relatively high on the robot. The Climber is mounted into carbon fiber side panels ("Wings").

Specifications
Extension distance: 25-7/8 in
Unloaded extension speed (1:1 Reduction): 17 in/s
Full Power Lifting speed (4:1 Reduction): 3.25 in/s (@ 33 A)
Maximum Hook Height: 76.5 in
Height of hanging robot: 55 in from centerline of Rung
Sensors
- Encoder on gearbox output shaft (measuring actual leadscrew rotations)
- Limit switch for minimum extension
- Limit switch for maximum extension
CAD
Solidworks CAD files.
Images
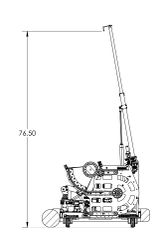
Maximum Hook Height
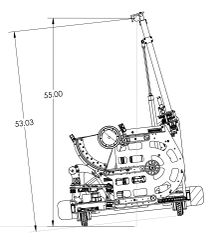
Robot Hanging Height

Bottom of Climber Extension - Bronze Leadscrew Nut (turned down) inside a 1" OD x 0.028" wall steel tube inside a printed square linear bearing, all held together with four 6-32 x 7/16" SHCSs which thread into the Leadscrew Nut. This all travels within a 1-1/2" x 1/16" wall 6061 Al square tube.

Aerin adds limit switches to Prime's Climber. We have an encoder on the Climber gearbox (after the shifter), but the potential for the leadscrews to damage the Climber mechanism led us to add this safeguard.

Prime's (painted) climber gearbox installed on Prime's Climber

side view

Leadscrew Drive pulleys & belts w/ 3/8" drill drive shaft visible






