Difference between revisions of "FTC 7314 Engineering Notebook 2014-12-30"
From DEW Robotics
(→Competition Season Meeting) |
Akhila2014 (talk | contribs) (→Competition Season Meeting) |
||
| (One intermediate revision by the same user not shown) | |||
| Line 20: | Line 20: | ||
| | | | ||
* To start the meeting, Laura and Nick discussed how the IR seeker worked, so they would be better equipped to write programs with it. | * To start the meeting, Laura and Nick discussed how the IR seeker worked, so they would be better equipped to write programs with it. | ||
| − | * | + | * They learned that there are 5 sensors inside the seeker, and you can get signal strengths for each one. |
| − | * | + | * They also learned that there are 9 "zones" that use the 5 sensors. If the energy from the beacon hits two sensors, then it is in a makeshift zone between them. In the program, you can get signal strengths, or the highest powered zone. The even number zones(which are when the energy hits two sensors) are much smaller, and thus more accurate. |
|- | |- | ||
| '''Working on Parking Zone Auton''' | | '''Working on Parking Zone Auton''' | ||
| | | | ||
* After learning about the IR seeker, Laura, Nick, and Akhila started to work on the parking zone auton. | * After learning about the IR seeker, Laura, Nick, and Akhila started to work on the parking zone auton. | ||
| − | * First, | + | * First, they got it to work with the new schematic. |
| − | * Then, the | + | * Then, the NXT started freezing. By disabling pieces of code, they determined it froze while reading the encoder counts, after searching with for the IR beacon. |
| − | * After many failed attempts to fix it, | + | * After many failed attempts to fix it, they tried a technique that a LabView employee sugessted. They wrote the other values from the encoder VI to an indicator. This fixed the freeze, and we continued on. |
| − | * | + | * They ran the program three times for each position of the center goal, and recorded the encoder counts and IR signal strengths. After gathering this data they wrote an algorithm to determine the position of the center goal. |
| − | * Next time | + | * Next time they work on auton, they will be able to continue to write the code to line up with the center goal, then knock the kickstand. |
|} <!-- End of tasks table; DO NOT REMOVE --> | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
| Line 48: | Line 48: | ||
! Recorded by: | ! Recorded by: | ||
! Date: | ! Date: | ||
| − | ! Journal Editor: | + | ! Journal Editor: Akhila |
! Date: | ! Date: | ||
|- <!-- <br />s are needed to create line breaks for empty lines in HTML --> | |- <!-- <br />s are needed to create line breaks for empty lines in HTML --> | ||
Latest revision as of 03:28, 14 January 2015
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 12/30/14 | 4-9pm | TCHS Brandywine | Nick, Laura, Akhila |
| Tasks | Reflections |
|---|---|
| Learning about the IR seeker |
|
| Working on Parking Zone Auton |
|
New battery mount in-situ w/ battery

New battery mount in-situ w/out battery
Servo installed for the diverter "valve"
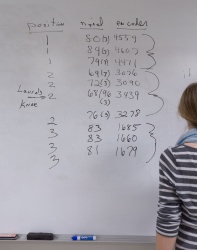
Data collected during center-goal autonomous testing
Lift full up for autonomous scoring





| Recorded by: | Date: | Journal Editor: Akhila | Date: |
|---|---|---|---|