Difference between revisions of "FTC 7314 Engineering Notebook 2015-09-26"
From DEW Robotics
MaiKangWei (talk | contribs) (→Action and idea Journal) |
Akhila2014 (talk | contribs) (→Competition Season Meeting) |
||
| (11 intermediate revisions by 3 users not shown) | |||
| Line 22: | Line 22: | ||
* Ball: 2.84" diameter; Mass: 30g | * Ball: 2.84" diameter; Mass: 30g | ||
|- | |- | ||
| − | | ''' | + | | '''Programmers Troubleshoot''' |
| | | | ||
| − | * | + | * Akhila, Jacob, and Justin worked on installing the required SDK's to begin programming. |
| − | + | |- | |
| + | | '''Intake manufacturing''' | ||
| + | | | ||
| + | * Trevor, and other people that helped with the intake, worked together to begin manufacturing the prototype intake. | ||
| + | * Amal was working with Mr. Goddard and was riveting pieces to put on the Tank Drive. | ||
|} <!-- End of tasks table; DO NOT REMOVE --> | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
| Line 34: | Line 38: | ||
!Tasks !! Reflections | !Tasks !! Reflections | ||
|- | |- | ||
| − | | ''' | + | | '''Debris lift''' |
| | | | ||
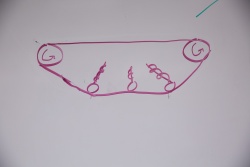
| − | * | + | * Bennet worked to prototype for the debris lifter in order to be able to test out its usefulness. It includes the tank treads with the plastic strips in in order to hold the debris. |
|- | |- | ||
| − | | ''' | + | | '''Drive Train''' |
| | | | ||
| − | * | + | * Daniel worked with Myles in order to brainstorm locations to place the motors that would allow the treads to wrap around. They found several places along the base of the robot and plan to find the proper tread lengths. |
| − | + | |- | |
| + | | '''Programming''' | ||
| + | | | ||
| + | * Today, the programmers worked on trying to configure the color sensors. The color sensors will be integral to our floor autonomous routine, considering they will be needed to track the white line, and the beacon box. | ||
| + | * Akhila looked at the Modern Robotics sensor, and discovered that it was really short range. However, there were lots of variables that could have affected this test. She didn't have quite enough time to finish the test, and will look at it at a later time. | ||
| + | * Another thing worth investigating is using the LED light feature on the sensors. This could really affect the way the program runs. Akhila is pretty excited to get this stuff going! | ||
| + | * The programmers also troubleshot environment issues with Jacob's laptop. By the end of the meeting, he was all set up! Now the programming team is officially ready to start real coding! | ||
|} <!-- End of tasks table; DO NOT REMOVE --> | |} <!-- End of tasks table; DO NOT REMOVE --> | ||
== Action and idea Journal== | == Action and idea Journal== | ||
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
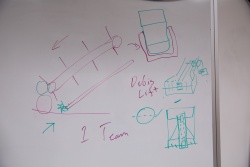
| − | image:FTC7314_150926-0.jpg| | + | image:FTC7314_150926-0.jpg|Drive-train concept 1 - plan view |
| − | image:FTC7314_150926-1.jpg| | + | image:FTC7314_150926-1.jpg|Drive-train concept 1 - side elevation |
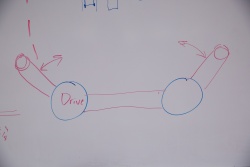
| − | image:FTC7314_150926-2.jpg| | + | image:FTC7314_150926-2.jpg|Drive-train concept 2 - side elevation |
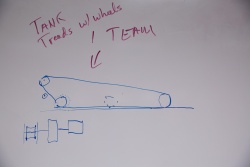
| − | image:FTC7314_150926-3.jpg| | + | image:FTC7314_150926-3.jpg|Drive-train concept 3 - side elevation |
| − | image:FTC7314_150926-4.jpg| | + | image:FTC7314_150926-4.jpg|Debris collector revised concept |
| − | image:FTC7314_150926-5.jpg| | + | image:FTC7314_150926-5.jpg|Daniel modifies the traction system to test drive-train concept 2 |
| − | image:FTC7314_150926-6.jpg| | + | image:FTC7314_150926-6.jpg|In the workshop... |
| − | image:FTC7314_150926-7.jpg| | + | image:FTC7314_150926-7.jpg|...building a Debris Collection... |
| − | image:FTC7314_150926-8.jpg| | + | image:FTC7314_150926-8.jpg|...prototype |
| − | image:FTC7314_150926-9.jpg| | + | image:FTC7314_150926-9.jpg|Cube debris |
| − | image:FTC7314_150926-10.jpg| | + | image:FTC7314_150926-10.jpg|Ball debris |
| − | image:FTC7314_150926-12.jpg| | + | image:FTC7314_150926-12.jpg|George Abersold and [[User:Gdeaver | Gary Deaver]] look at the Modern Robotics color sensor |
</gallery> | </gallery> | ||
Latest revision as of 03:49, 4 December 2015
Competition Season Meeting
| Meeting Date | Meeting Time | Location | Attendees |
|---|---|---|---|
| 26-September-2015 | 2:00 - 4:00PM | TCHS Brandywine | Akhila, Justin, Amal, Bennett, Wade, Daniel, Trent, Jacob, Myles |
| Objectives / Systems | Hypotheses, tests, observations, conclusions, plans |
|---|---|
| Debris Measurements |
|
| Programmers Troubleshoot |
|
| Intake manufacturing |
|
| Tasks | Reflections |
|---|---|
| Debris lift |
|
| Drive Train |
|
| Programming |
|
Action and idea Journal
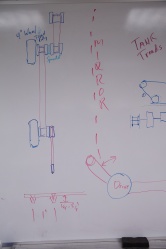
Drive-train concept 1 - plan view
Drive-train concept 1 - side elevation
Drive-train concept 2 - side elevation
Drive-train concept 3 - side elevation
Debris collector revised concept

Daniel modifies the traction system to test drive-train concept 2

In the workshop...

...building a Debris Collection...

...prototype
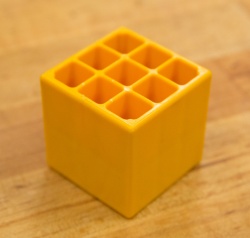
Cube debris

Ball debris

George Abersold and Gary Deaver look at the Modern Robotics color sensor












| Recorded by: | Date: | Journal Editor: | Date: |
|---|---|---|---|