Difference between revisions of "Nisso-Denko (Window) Motor Locking Pins"
MaiKangWei (talk | contribs) |
MaiKangWei (talk | contribs) |
||
| (3 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
Team 1640's 2010 [http://en.wikipedia.org/wiki/Breakaway_(FIRST) ''BREAKAWAY''] robot, [[DEWBOT VI]] is equipped with a novel, [[DEWBOT VI Creativity Award sponsored by Xerox (Philadelphia Regional) | award-winning]] multi-mode, [[4-Wheel Pivot Drive | 4-wheel independent pivot drive-train]]. Kit-of-Parts Nippon-Denso Window Motors were selected as steering motors for the four (4) pivots. These steering motors are driven by tan Jaguar motor controllers. | Team 1640's 2010 [http://en.wikipedia.org/wiki/Breakaway_(FIRST) ''BREAKAWAY''] robot, [[DEWBOT VI]] is equipped with a novel, [[DEWBOT VI Creativity Award sponsored by Xerox (Philadelphia Regional) | award-winning]] multi-mode, [[4-Wheel Pivot Drive | 4-wheel independent pivot drive-train]]. Kit-of-Parts Nippon-Denso Window Motors were selected as steering motors for the four (4) pivots. These steering motors are driven by tan Jaguar motor controllers. | ||
| − | 1640 has experienced on-going, | + | 1640 has experienced on-going, intermittent lock-up of the steering motors during practice and competition. Symptoms are: |
:* One pivot suddenly ceases to respond to control, becoming locked at current angle | :* One pivot suddenly ceases to respond to control, becoming locked at current angle | ||
:* Wheel drive (CIM) continues to operate. So do the other pivots' steering | :* Wheel drive (CIM) continues to operate. So do the other pivots' steering | ||
| Line 14: | Line 14: | ||
The problem was noted at both [[DEWBOT VI PARC XIII#Mechanical Problems | PARC]] and [[DEWBOT VI Monty Madness#Problems Encountered | Monty Madness]]. It has been experiences as well during driver practice and at demonstrations. | The problem was noted at both [[DEWBOT VI PARC XIII#Mechanical Problems | PARC]] and [[DEWBOT VI Monty Madness#Problems Encountered | Monty Madness]]. It has been experiences as well during driver practice and at demonstrations. | ||
| − | Mentor Gary Deaver, following a [http://www.chiefdelphi.com/forums/showthread.php?threadid=83973 thread] on [http://www.chiefdelphi.com Chief Delphi] cited | + | Mentor Gary Deaver, following a [http://www.chiefdelphi.com/forums/showthread.php?threadid=83973 thread] on [http://www.chiefdelphi.com Chief Delphi] cited incompatibility between Jaguars and Window Motors. The problem encountered by other teams appears to be the same as the one we encountered (intermittent lock-up). Many responses indicated that switching to Victors solved the problem. One indicated that the new Black Jaguars avoided this problem. Others cited the motor's internal positive temperature coefficient (PTC) resistor as the problem's source. |
Replacing tan Jaguars with Black Jaguars did not solve the lock-up problem. | Replacing tan Jaguars with Black Jaguars did not solve the lock-up problem. | ||
| − | Drilling templates were prepared for switching to Victors, but before we executed on the Victor change, Gary Deaver cited | + | Drilling templates were prepared for switching to Victors, but before we executed on the Victor change, Gary Deaver [http://www.chiefdelphi.com/forums/showthread.php?p=963806#post963806 cited] the existence of locking pins within the Window Motor drive. These locking pins lock the drive coupling in one direction in response to excessive torque. |
A spare motor was first disassembled. Pins located and removed. Then reassembled and tested. | A spare motor was first disassembled. Pins located and removed. Then reassembled and tested. | ||
| − | This process was then repeated for the four (4) steering motors. | + | This process was then repeated for the robot's four (4) installed steering motors. |
| − | Initial testing of the drive is promising | + | Initial testing of the drive is promising. No lock-ups (yet). More testing is needed to know whether we've solved the problem. |
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
Image:DB6_Nisso_sequence_100526_csm_01.jpg|Nippon-Denso Window Motor, as-installed on [[DEWBOT VI]] | Image:DB6_Nisso_sequence_100526_csm_01.jpg|Nippon-Denso Window Motor, as-installed on [[DEWBOT VI]] | ||
| − | Image:DB6_Nisso_sequence_100526_csm_02.jpg|Motor removed, showing motor-side | + | Image:DB6_Nisso_sequence_100526_csm_02.jpg|Motor removed, showing motor-side (drive)coupling |
| − | + | Image:DB6_Nisso_sequence_100526_csm_04.jpg|Gearbox showing gearbox-side (driven) coupling and retaining clip | |
| − | |||
| − | Image:DB6_Nisso_sequence_100526_csm_04.jpg|Gearbox showing gearbox-side coupling and retaining clip | ||
Image:DB6_Nisso_sequence_100526_csm_07.jpg|Removing the retaining clip | Image:DB6_Nisso_sequence_100526_csm_07.jpg|Removing the retaining clip | ||
| − | Image:DB6_Nisso_sequence_100526_csm_08.jpg| | + | Image:DB6_Nisso_sequence_100526_csm_08.jpg|Gearbox showing gearbox-side (driven) coupling w/out retaining clip. White locking pin cage visible around coupling. |
| − | Image:DB6_Nisso_sequence_100526_csm_09.jpg| | + | Image:DB6_Nisso_sequence_100526_csm_09.jpg|Gearbox showing gearbox-side (driven) coupling after removal of the locking pin cage. |
| − | Image:DB6_Nisso_sequence_100526_csm_10.jpg| | + | Image:DB6_Nisso_sequence_100526_csm_10.jpg|retaining clip & locking pin cage with locking pins in-place |
| − | Image:DB6_Nisso_sequence_100526_csm_11.jpg| | + | Image:DB6_Nisso_sequence_100526_csm_11.jpg|locking pins removed from the cage |
Image:DB6_Douglas_Heather_Nisso_mods_100526_csm.jpg|Douglas & Heather McKown modify the steering motors | Image:DB6_Douglas_Heather_Nisso_mods_100526_csm.jpg|Douglas & Heather McKown modify the steering motors | ||
</gallery> | </gallery> | ||
| − | :[[Category: Engineering]][[Category:DEWBOT VI]][[Category:Drive-train]] | + | :[[Category: Engineering]][[Category:DEWBOT VI]][[Category:Drive-train]][[Category:Swerve Drive]] |
Latest revision as of 12:29, 27 January 2015
Team 1640's 2010 BREAKAWAY robot, DEWBOT VI is equipped with a novel, award-winning multi-mode, 4-wheel independent pivot drive-train. Kit-of-Parts Nippon-Denso Window Motors were selected as steering motors for the four (4) pivots. These steering motors are driven by tan Jaguar motor controllers.
1640 has experienced on-going, intermittent lock-up of the steering motors during practice and competition. Symptoms are:
- One pivot suddenly ceases to respond to control, becoming locked at current angle
- Wheel drive (CIM) continues to operate. So do the other pivots' steering
- Motor at low temperature when lock-up occurs, but rapidly becomes too hot to touch.
- Jaguar LED indicates that full power is being provided to the locked motor.
- Voltmeter confirms that full power (12 V) is being provided to the locked motor.
- Either unplugging the Jaguar PWM cable, or "rebooting" the robot corrects the lock-up.
- Lock-up has been experienced with all wheels, although it appears to occur more frequently with some (wheels 1 & 4) than others (2 & 3).
- Locked-up motors are not mechanically constrained from turning.
- Anecdotally, lock-ups may be associated with aggressive steering maneuvers.
The problem was noted at both PARC and Monty Madness. It has been experiences as well during driver practice and at demonstrations.
Mentor Gary Deaver, following a thread on Chief Delphi cited incompatibility between Jaguars and Window Motors. The problem encountered by other teams appears to be the same as the one we encountered (intermittent lock-up). Many responses indicated that switching to Victors solved the problem. One indicated that the new Black Jaguars avoided this problem. Others cited the motor's internal positive temperature coefficient (PTC) resistor as the problem's source.
Replacing tan Jaguars with Black Jaguars did not solve the lock-up problem.
Drilling templates were prepared for switching to Victors, but before we executed on the Victor change, Gary Deaver cited the existence of locking pins within the Window Motor drive. These locking pins lock the drive coupling in one direction in response to excessive torque.
A spare motor was first disassembled. Pins located and removed. Then reassembled and tested.
This process was then repeated for the robot's four (4) installed steering motors.
Initial testing of the drive is promising. No lock-ups (yet). More testing is needed to know whether we've solved the problem.

Nippon-Denso Window Motor, as-installed on DEWBOT VI

Motor removed, showing motor-side (drive)coupling

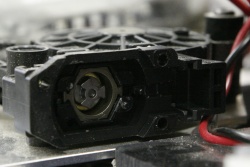
Gearbox showing gearbox-side (driven) coupling and retaining clip

Removing the retaining clip

Gearbox showing gearbox-side (driven) coupling w/out retaining clip. White locking pin cage visible around coupling.
Gearbox showing gearbox-side (driven) coupling after removal of the locking pin cage.

retaining clip & locking pin cage with locking pins in-place

locking pins removed from the cage
Douglas & Heather McKown modify the steering motors








