Difference between revisions of "Nisso-Denko (Window) Motor Locking Pins"
MaiKangWei (talk | contribs) |
MaiKangWei (talk | contribs) |
||
| Line 1: | Line 1: | ||
| − | Team 1640's 2010 BREAKAWAY robot, [[DEWBOT VI]] is equipped with a 4-Wheel | + | Team 1640's 2010 [http://en.wikipedia.org/wiki/Breakaway_(FIRST) ''BREAKAWAY''] robot, [[DEWBOT VI]] is equipped with a a novel, [[DEWBOT VI Creativity Award sponsored by Xerox (Philadelphia Regional) | award-winning]] multi-mode, [[4-Wheel Pivot Drive | 4-wheel independent pivot drive-train]]. Kit-of-Parts Nisso-Denko (Window) Motors were selected as steering motors for the four (4) pivots. These steering motors are driven by tan Jaguar motor controllers. |
| + | |||
| + | 1640 has experienced on-going, intermittant lock-up of the steering motors during practice and competition. | ||
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
| Line 7: | Line 9: | ||
Image:DB6_Nisso_sequence_100526_csm_05.jpg|Motor-side coupling (need not be removed) | Image:DB6_Nisso_sequence_100526_csm_05.jpg|Motor-side coupling (need not be removed) | ||
Image:DB6_Nisso_sequence_100526_csm_06.jpg|Gearbox showing gearbox-side coupling and retaining clip | Image:DB6_Nisso_sequence_100526_csm_06.jpg|Gearbox showing gearbox-side coupling and retaining clip | ||
| − | Image:DB6_Nisso_sequence_100526_csm_07.jpg| | + | Image:DB6_Nisso_sequence_100526_csm_07.jpg|Removing the retaining clip |
Image:DB6_Nisso_sequence_100526_csm_08.jpg| | Image:DB6_Nisso_sequence_100526_csm_08.jpg| | ||
Image:DB6_Nisso_sequence_100526_csm_09.jpg| | Image:DB6_Nisso_sequence_100526_csm_09.jpg| | ||
Revision as of 12:20, 27 May 2010
Team 1640's 2010 BREAKAWAY robot, DEWBOT VI is equipped with a a novel, award-winning multi-mode, 4-wheel independent pivot drive-train. Kit-of-Parts Nisso-Denko (Window) Motors were selected as steering motors for the four (4) pivots. These steering motors are driven by tan Jaguar motor controllers.
1640 has experienced on-going, intermittant lock-up of the steering motors during practice and competition.

Nisso-Denko (Window) Motor, as-installed on DEWBOT VI

Motor removed, showing motor-side coupling
- DB6 Nisso sequence 100526 csm 03.jpg
Motor with motor-side coupling removed (the motor-side coupling need not be removed from the motor)
- DB6 Nisso sequence 100526 csm 05.jpg
Motor-side coupling (need not be removed)
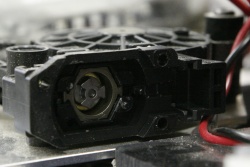
- DB6 Nisso sequence 100526 csm 06.jpg
Gearbox showing gearbox-side coupling and retaining clip

Removing the retaining clip



Douglas & Heather McKown modify the steering motors







