Difference between revisions of "Talk:DEWBOT VIII Hatsboro-Horsham"
MaiKangWei (talk | contribs) (→Post-Hatboro-Horsham Photo Gallery) |
MaiKangWei (talk | contribs) (→Post-Hatboro-Horsham Photo Gallery) |
||
| Line 77: | Line 77: | ||
Image:DB8_Unbagging_120318_csm-10.jpg|Patrick C stiching belts together (thanks!) | Image:DB8_Unbagging_120318_csm-10.jpg|Patrick C stiching belts together (thanks!) | ||
Image:DB8_Unbagging_120318_csm-11.jpg|Yahya, Varun & Andrew | Image:DB8_Unbagging_120318_csm-11.jpg|Yahya, Varun & Andrew | ||
| − | Image:DB8_Unbagging_120318_csm-12.jpg| | + | Image:DB8_Unbagging_120318_csm-12.jpg|Sasha & Kira |
| − | Image:DB8_Unbagging_120318_csm-13.jpg| | + | Image:DB8_Unbagging_120318_csm-13.jpg|Kira |
| − | Image:DB8_Unbagging_120318_csm-14.jpg| | + | Image:DB8_Unbagging_120318_csm-14.jpg|Andrew & Yahya |
| − | Image:DB8_Unbagging_120318_csm-15.jpg| | + | Image:DB8_Unbagging_120318_csm-15.jpg|Scott Featherman & Patrick C |
| − | Image:DB8_Unbagging_120318_csm-16.jpg| | + | Image:DB8_Unbagging_120318_csm-16.jpg|Lucy, Ian & Patrick C |
| − | Image:DB8_Unbagging_120318_csm-17.jpg| | + | Image:DB8_Unbagging_120318_csm-17.jpg|Programmers: Mike M, DJ & Patrick D |
| − | Image:DB8_Unbagging_120318_csm-18.jpg| | + | Image:DB8_Unbagging_120318_csm-18.jpg|Labview code on laptop |
| − | Image:DB8_Unbagging_120318_csm-19.jpg| | + | Image:DB8_Unbagging_120318_csm-19.jpg|Gary Deaver, Andrew & Yash |
| − | Image:DB8_Unbagging_120318_csm-20.jpg| | + | Image:DB8_Unbagging_120318_csm-20.jpg|[[User:Siri|Siri Maley]], Ian, Patrick C & Ben Kellom |
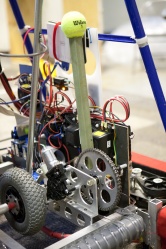
| − | Image:DB8_Unbagging_120318_csm-21.jpg| | + | Image:DB8_Unbagging_120318_csm-21.jpg|Beater Bar pulleys showing new Al pulley doubling speed of the beater bar |
| − | Image:DB8_Unbagging_120318_csm-22.jpg| | + | Image:DB8_Unbagging_120318_csm-22.jpg|Minion graphics around camera (Thanks, Molly) |
| − | Image:DB8_Unbagging_120318_csm-23.jpg| | + | Image:DB8_Unbagging_120318_csm-23.jpg|Robot mass 111 lb<sub>m</sub>. DEWBOT's been on a diet since Horsham |
| − | Image:DB8_Unbagging_120318_csm-24.jpg| | + | Image:DB8_Unbagging_120318_csm-24.jpg|[[DEWBOT VIII] on the scale |
| − | Image:DB8_Unbagging_120318_csm-25.jpg| | + | Image:DB8_Unbagging_120318_csm-25.jpg|Bridge Arm Assembly |
| − | Image:DB8_Unbagging_120318_csm-26.jpg| | + | Image:DB8_Unbagging_120318_csm-26.jpg|On-Field... |
| − | Image:DB8_Unbagging_120318_csm-27.jpg| | + | Image:DB8_Unbagging_120318_csm-27.jpg|...prepared for Lenepe |
</gallery> | </gallery> | ||
---- | ---- | ||
[[Category:DEWBOT VIII]][[Category:Photo Galleries]] | [[Category:DEWBOT VIII]][[Category:Photo Galleries]] | ||
Revision as of 04:09, 19 March 2012
Contents
Post-Mortem
What Worked
- We won!
- Barrier Crossing
- Pivot Drive - but there are ease-of-use issues
- Shooter - but did not use speed control
- Manual aiming using camera - automatic aiming not tried
- Lift logic seems okay
341 said that they picked us as an alliance partner because:
- Ability to cross the barrier
- Autononous
- They trusted us (the drive team)
Further, they inicated that we were:
- Not arrogant
- Tenacious
- Coaches talk
What didn't
- Bumpers
- Fell off (fixed)
- Too big (pool noodles too large diameter)
- Too high
- We shear mounting rivets (change to steel)
- runs over balls
- Bridge Arm
- Did not allow us to get the bridge down to drive on
- Eye-pokers should be addressed
- Ball Lift
- Excessive compression
- Rails not anchored at top and actually crossed at one point
- Beater bar too high & slow
- Guide rails / funnel did not work - balls went under
Improvements needed
- Easier (more intuitive) to drive & operate
- Can we measure ball compressibility?
- Lighter, more transparent covering
- Auto aiming needed (needs to be fast & accurate)
- Shooter speed control needed
- Need a stronger and more reliable autonomous suite for Lenape
Action Plan
- Get deux working - Featherman & Deaver this week
- Retest 4-slot cRIO
- Use 8-slot cRIO if 4-slot not working
- Set up meetings with different focus - Mechanical / Programming / Training - w/ cross coverage to address issues
- Identify where mass can be reduced - Kellom
- Get vision processing & targeting working - Programming
- Develop a bridge arm that works - McKown & Kulik
- Fix Lift system - Deaver
- Robot must be mechanically/electrically complete prior to arrival at Lenape
- Rationalize driver controls
Bridge arm examples
Post-Hatboro-Horsham Photo Gallery

Winner Banners

Prototype Bridge Arm (Drive) prototype on Deux

Molly, Sasha, Julie Christopher & Andrew

Molly, Sasha, Julie Christopher, Andrew, Deux, Scott Featherman & Gary Deaver

DEWBOT VIII (deux) trying to push DEWBOT VI up the Bridge (as deadweight)

Sasha & Molly design a new Al pully for the beater bar drive

Molly & 54T Sprocket

Kira, Lucy & Gary Deaver prepare for some carbon fiber work

Pulley

DEWVOT VIII Prime unbagged at 1:52, 18-Mar

Patrick C

Yahya & Lucy

Lucy

Kira & Sasha

Team around DEWBOT VIII

Yahya, Patrick C, Molly & Lucy

Patrick C punching holes in belt; Lucy in background

Lucy

Patrick C stiching belts together (thanks!)

Yahya, Varun & Andrew

Sasha & Kira

Kira

Andrew & Yahya

Scott Featherman & Patrick C

Lucy, Ian & Patrick C

Programmers: Mike M, DJ & Patrick D
Labview code on laptop

Gary Deaver, Andrew & Yash

Siri Maley, Ian, Patrick C & Ben Kellom
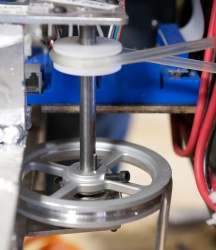
Beater Bar pulleys showing new Al pulley doubling speed of the beater bar
Minion graphics around camera (Thanks, Molly)

Robot mass 111 lbm. DEWBOT's been on a diet since Horsham

[[DEWBOT VIII] on the scale
Bridge Arm Assembly

On-Field...
...prepared for Lenepe



































