Difference between revisions of "Twitch"
MaiKangWei (talk | contribs) |
|||
| Line 1: | Line 1: | ||
| − | Twitch | + | ==Twitch or Linkage Drive== |
| − | <gallery widths= | + | FRC 1565 Think Tank Tech in Cambridge, Ontario created a linkage drive in 2007/2008. The intial video's showed good mobility and speed. This drive was one of the canidate drives to prototype. |
| + | |||
| + | The drawings below show our interpretation of the drive setup. | ||
| + | |||
| + | <gallery widths=360 heights=220> | ||
File:Twitch dwg x.jpg|Twitch - x drive | File:Twitch dwg x.jpg|Twitch - x drive | ||
File:Twitch dwg y.jpg|Twitch - y drive | File:Twitch dwg y.jpg|Twitch - y drive | ||
| + | </gallery> | ||
| + | |||
| + | == VEX Prototype == | ||
| + | In the summer of 2008 we built a prototype version of the linkage drive. Each wheel had a direct drive motor. The twitch action was performed by rack/pinion gear set up. It took about five second to do a full cycle. The software was set up to be arcade drive on the right joystick, the left joystick controlled the twitch function. The software allowed the driver to pick the "virtual" front of the robot. | ||
| + | |||
| + | In the pictures below you can see the cycle take place. | ||
| + | |||
| + | <gallery widths=200 heights=300> | ||
| + | File:Twitch VEX 2008 1.jpg|Twitch wheels in N/S position | ||
| + | File:Twitch VEX 2008 2.jpg|Wheels 1/2 through the travel | ||
| + | File:Twitch VEX 2008 3.jpg|Twitch wheels in E/W position | ||
</gallery> | </gallery> | ||
Revision as of 01:31, 14 June 2009
Twitch or Linkage Drive
FRC 1565 Think Tank Tech in Cambridge, Ontario created a linkage drive in 2007/2008. The intial video's showed good mobility and speed. This drive was one of the canidate drives to prototype.
The drawings below show our interpretation of the drive setup.
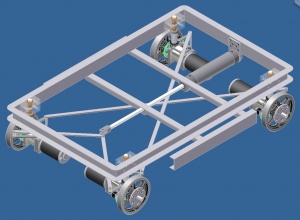
Twitch - x drive
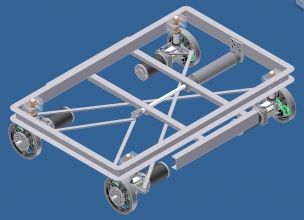
Twitch - y drive


VEX Prototype
In the summer of 2008 we built a prototype version of the linkage drive. Each wheel had a direct drive motor. The twitch action was performed by rack/pinion gear set up. It took about five second to do a full cycle. The software was set up to be arcade drive on the right joystick, the left joystick controlled the twitch function. The software allowed the driver to pick the "virtual" front of the robot.
In the pictures below you can see the cycle take place.
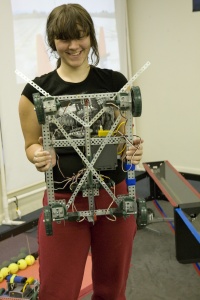
Twitch wheels in N/S position

Wheels 1/2 through the travel
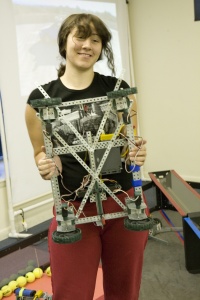
Twitch wheels in E/W position


