DEWBOT XII Boulder Intake
Contents
Intake Objectives
- Pick Boulders off floor
- Load Boulders into Catapult
- Eject Boulders into low goals
- Secures Boulders during Outer-Works crossing
Intake Specifications
- Intake should be as near to full chassis width as possible
- Intake should capture any Boulder it touches
- Intake must reliably load the catapult
- Needs to capture Boulders and load catapult quickly
- Must hold Boulders in catapult while crossing Outer-Works defenses
- Must be pre-loadable with (1) Boulder without any robot element extending beyond the frame perimeter for game start
- Don't jam
- Don't load Boulders into the chassis x-catapult
Design Considerations
Focus was on an over-the-bumper intake mechanism from the start, as this was most compatible with a wide capture zone.
A 2-roller intake was prototyped, tested and designed. The two rollers were connected via polycord loops.
The roller which first contacts the boulder was driven by the intake drive. The polycords drive the 2nd roller.
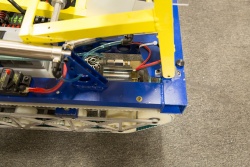
Intake rollers are driven by a VevPro 775Pro motor using a VersaPlanetary gearbox. A 7:1 reduction was used for intakes 1 & 2 (see below); 10:1 for Intake 3 (due to the 1:1 miter gear replacing the 26:15 chain & sprockets which provided a 12.13 overall reduction).
DEWBOT XII's intake went through three major stages, with small modification along the way. The three major stages three discrete intakes, each of these built from scratch.
- Intake #1 was built with the robot. It was used during all of the qualifying events ( Hatboro-Horsham, Seneca and Westtown). This intake's performance was good, but the abusive nature of Stronghold led this intake to seriously degrade at Westtown. Welds broke and had to be patched. Sprockets came off. It was time for a new intake after Westtown. Intake #1 was based on a weldment comprising 1" square tube and 1" angle (all 1/8" wall).
- Intake #2 was build in the run-up to MAR Championship. It was largely a strengthened version of Intake #1, but with some changes we expected to improve boulder movement. Alas, this intake did not work as-built. There were three key issues: 1 - greater moment arm caused the deployment to be excessively violent and would have damaged either the intake or robot in use; 2- The intake released the boulder too early and it sometimes got caught in the chassis; and 3 - constriction in the ball path caused occasional jams. Problems 1 & 2 were addressed during the course of the MAR Championship qualification matches. Poor intake performance significantly contributed to 1640's poor competitive performance at MAR Championship. Like Intake #1, Intake #2 was based on a weldment with 1" square tube replacing most of the 1" angle with gussets added.
- Intake #3 was redesigned and rebuilt for FRC Championship. This intake design removed the drive motor from the boulder path by replacing the chain drive with miter gears. The new design also kept moment arm to a minimum. Pinch points were avoided by rigorously keeping cross elements (excluding rollers) well outside the boulder pathway. This design remained in-use through Ramp Riot. This was a successful, although somewhat fragile design. It was completely rebuilt once.
Drawings
Experience & Post-Design Modifications
The intake 1, 2, 3 sequence is outlined above. This does not repeat the intake success of 2014, but it mostly wasn't bad. Intake #2 was not successful for a number of reasons, and this was critical to our lack of success during the MAR Championship. Intake #3 was generally successful, but subject to damage and had to be completely rebuilt following severe damage sustained during the SWE Conference demonstration.
Intakes 1 & 2 put the intake drive motor into a position where it could interfere with the ball path. Intake 3 avoided this.
New Manufacturing Techniques
Photographs

Kevin with prototype

Testing the prototype

Madi with ball intake weldment

Grooving a polyurethane roller on the CNC lathe

Andrew Weissman and Madi assemble a boulder pick-up

Grooved polyurethane roller for ball pick-up

Fatima preparing Prime's ball intake for painting