Talk:DEWBOT VI Monty Madness
Contents
Possessor
Sab-BOT-age has struggled over the possessor, without being able an effective device.
I would like to explore a completely different approach. Team 103 Cybersonics has an effective vacuum-type possessor. There are two units, left and right, allowing space for a central kicker. Vacuum is provided by two axial 3-blade propellers (L&R) each driven by an ungeared FisherPrice motor. Two rollers (L&R) within the vacuum plenum contact the ball, allowing it to roll on the floor while in possession.
With this possessor, we would not need such a wide kicker. It could be cut down.
A drawback is the need to position the ball into the central possessor by driving. Our current possessor does not center (or possess), but allows accurate kicking over a wide portion of the robot's width.
I will work first in Inventor to develop this concept for DEWBOT VI.
Follow-up 23-May
- A first-cut analysis using inventor indicates that it is geometrically feasible to replace the current possessor with a vacuum-type device along the lines of 103's
- But during the S.T.E.M. Defined! domonstration, we observed that the current possessor actually works pretty well.
- A low, hinged roller bar was tested on 23-May, without success.
Mirror
Suggest we install a polymer mirror on the robot front to help us see and therefore clear balls hiding behind the bumps. We need to test the concept this week. I'll arrange materials & time.
Follow-up 23-May
- A large, spring loaded mirror on top of the robot is now conteplated. Angled slightly downwards to provide a view behind the bump. Sasha and Andrew are pursuing the design of this mirror.
- The mirror cannot be glass, of course. Polymer or chromed metal preferred.
- Spring-loading is preferred to allow passage through the tunnel. Details need to be worked out (the devil is always in the details).
- In use, the robot would be run up behind the bump, facing the bump's rear (hidden) side. The the robot would strafe right and/or left to look for hidden balls. Once found, the robot could more forward to clear the balls, either by capturing them with the possessor and kicking to score, or by chipping them over the bump at close range.
Follow-up 24-May
- An aluminumized mylar sheet was purchased for mock-up and prototyping purposes.
- A 24" x 24" x 1/8" aluminized polycarbonate mirror ordered from McMaster-Carr. Plan to use half of this.
Autonomous
A huge improvement over earlier autonomous! Can we make it more reliable?
Extensive autonomous testing on 21-May.
Autonomous concepts articulated on 23-May.
Reliable straight-forward autonomous demonstrated 24-May.
Angled-chassis autonomous first demonstrated late on 26-May.
Drive-train
Erratic drive-train behavior plagued us at Monty Madness. Appears to be a new problem. Cause?
Testing on 20-May provides data - not all of which makes sense.
Gary Deaver on 23-May cites a Chief Delphi issue between Jaguar motor controllers and Nisso-Denko motors. This issue apparently does not apply to Victors and Nisso-Denko motors. We will test. Drilling template designed 23-May. Template made same day. GD - 5-24-2010 It was mentioned on the post that Black Jags do not have the problem. It's easier to swap black and tan jags. Do we try this? CM - Yes, of course - on 24-May - good test - alas, no joy.
Before executing the switch from Jaguars to Victors on the steering motor controllers, Gary Deaver cited a point made on Chief Delphi (where?) that the Nippon Denso Window Motors we use for steeing possess locking pins which lock the drive under excessive torque and remain locked until that torque is released. After a test on a spare motor, we removed the locking pins from all of the installed Nippon Denso Window Motors. Initial testing looks good, but we need to test more exhaustively before we know this is really a fix.
Human Interface
Note: this version is now outdated. See 10 July Control Map for next version.
Paul has added new drive capabilities, but these are underutilized (or unutilized) by the driver. Why?
- not useful capabilities?
- difficult (non-intuitive) control?
- inadequate training?
- complaicent driver?
- do I really need to buy an X-Box?

x-box control layout on 14-May
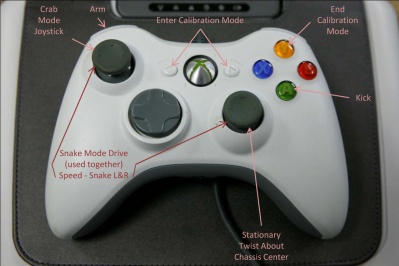
x-box control layout on 14-May


The X-box control in my opinion is well implemented and natural for anybody who plays X-box first person shooters. The problem with the human interface and the reason that drivers have a hard time mastering it is the velocity control. We were constrained to about 10 FPS drive reduction. When this wide range is mapped to the joy stick, the result is a slight movement on the left joystick gives a great change in velocity. We are limited to increasing the drive reduction. We could get it down to about 8 FPS. This is still high for this years game. I suspect a 5 to 6 FPS would be a good range. After this weekend's competition encoders or a tachometer would allow software velocity control. Would put the C-rio to the test with 8 PID's. I have hall effect latch chips. Need to play with this. 5-26-2010- Deaver
17-May-2010
Changed the tread on wheel 1. The tread on this wheel (Right Rear - also the only "Deaver Attachment" wheel at Monty) had been polished smooth at Monty Madness (but still securely on the wheel). See wheel photos below.

Wheel 3

Wheel 2

Wheel 4

Wheel 1




Also replaced the jammed wheel axle collar.
Charged battery #1 with an old charger for testing.
18-May-2010
Gary Deaver upgraded the wheel tread attachments to the "Deaver" system.
All other effort was focused on preparation for the S.T.E.M. Defined! demonstration.
19-May-2010
S.T.E.M. Defined! demonstration night. Here's the surprise: the possessor works! Pretty well, in fact. The need to to explore a completely different approach has to be rethought.
- Interesting. What's it look like up close if you, Carly & Sasha stand 40ft away as they drive (a la competition)? Are we missing something in drive team observation/control here?--Siri 12:16, 22 May 2010 (UTC)
- Sound is a large part of what we miss is competition. At a demo, Carly is near the robot and can hear the change in the possessor motor's sound as the possessor engages a ball. At a competition, this sound is lost. Secondarily, drivers at demos are more relaxed. This makes the finesse needed to use the possessor effectively easier. Thirdly, I think that the driver's expectation at Monty Madness was an ineffective possessor. Little was needed to support that preconception and little effort expended to refute it at the competition.--Clem 23-May
- Re:Firstly: That's what I figured. Any particular reason we're not training (excluding demos) as we compete? (Plus we still have though awesome speakers...)--Siri 15:22, 26 May 2010 (UTC)
The possessor is effective at:
- pulling the ball slowly backwards with the robot
- holding the ball in contact while pivoting about the ball to aim
- holding the ball in contact while driving sideways to bring the ball into the kicking zone. This kicking zone is a generous 15 inches wide.
What the possessor is ineffective at:
- driving forward. With the possessor driving inwards and driving the robot forwards, the possessor generally sucks the ball under the robot.
- What happens if we ramp it up to where it used to swallow the balls, and then pulse the roller instead of running it continuously? Can we balance the counter-tractions? EDIT: Many other teams (on CD and in person) seem like pulsing their ball magnets.--Siri 12:16, 22 May 2010 (UTC)
- also nervous, jerky and overly aggressive drivers will lose the ball. Finesse is needed.
- driving forward. With the possessor driving inwards and driving the robot forwards, the possessor generally sucks the ball under the robot.
20-May-2010
Paul & Clem McKown
Worked on erratic wheel steering behavior. Also, Paul practiced driving and shooting, in the process qualifying as a competition Driver.
It is clear that under either of the two conditions, that we have problems with steering motors:
- If robot battery voltage under load drops too low, below about 10 V.
- If we run the robot too long, the steering motors get hot and thermal trip.
However, it is also clear that at times pivots cease steering at good battery voltage and with cool steering motors. When this occurs,
- the Classmate indicates that it knows that the wheel is out of position versus setpoint;
- the Jaguar indicates that it is sending out full power;
- 12 V is measured across the Jaguar output terminals with a voltmeter;
- yet the motor does not turn, nor does it get hot; and
- "rebooting" the robot corrects the problem.
Tres bizarre. I am mystified. Any enlightenment would be most welcome.
21-May-2010
Paul & Clem McKown (Paul definitely in charge)
Autonomous development night. We ran 34 autonomous tests, varying robot speed, possessor speed and direction, and IR-kicker trigger voltage.
We also ran some tests without downloading permanent code. Operation with temporary code was strongly correlated with "happy wheels" behavior. It is understood that this is different than Finger Lakes "happy wheels", despite similar symptoms.
Best kicking performance was achieved with the possessor off. Worst with possessor reversed (where the ball is pushed away from the robot and a weak kick or no connection result). When the possessor is on, we tend to pull balls under the chassis. This either supresses kicking or results in a weak kick.
The IR trigger is very unreliable. We've tuned to to be generally too sensitive. The alternative seems to be not sensitive enough. We definitely do not have this sensor thing right yet!
23-May-2010
Paul, Sasha, Nichole, Andrew, Jen, Carly, Mike Rizzo, Gary Deaver, Rita Wall, Faith & Clem McKown
Mike Rizzo & Gary Deaver prototyped a hinged, low possessor roller. Good idea, but no joy.
Mirror concept expanded upon (changed from short below-bumper concept to taller, spring-loaded, top-of-robot concept based on obvious reality). The system design is assigned to Andrew & Sasha (Clem McKown to play role of mentor & facilitator only). Carly agrees that such a mirror could be very useful in competition.
Severely worn possessor drive polycords were replaced with spares (spares were not replaced).
Some autonomous concepts were articulated:
- Pre-align wheels and set kicker to armed via tether prior to setting the robot on the field. Remove these steps from the start of autonomous.
- Turn off steering control during (at least the early portion of) autonomous period (allowing possibility of a side-move at the latter part to clear path for alliance scoring). Thought is that in absence of steering control, the robot is more likely to continue on a straight forward path. Currently, the steering control is in-effect (steering straight ahead).
- In order to avoid interfering with alliance scoring, we should target the middle column of ball positions for mid-field or near-field autonomous. Our drive-train provides us with a unique opportunity in this regard, as the drive direction and kicker orientation are independent. For mid-field, the wheels should be pre-offset 22° CW (looking from above). For near-field, this needs to be 50° CW (again, from above). All wheels should be run at the same angle and speed (this is crab drive, afterall). This (very excellent) idea is from Jon Davis. We are learning to exploit the benefits of our unique drive-train.
Regarding steering reliability, this is an important issue. Gary Deaver cites a Chief Delphi thread indicating a problem between Jaguar motor controllers and Nisso-Denko motors. This issue apparently does not apply to the combination of Victors and Nisso-Denko motors. We will test. Drilling template designed. Template made. We meet tomorrow to execute.
24 May 2010
GD - 5-24-2010 It was mentioned on the post that Black Jags do not have the problem. It's easier to swap black and tan jags. Do we try this?
Foster -> Yes, swapping the "tan" jags for "black" jags on the two Jag panels will take less than 10 mins per side (get some help we can do both sides at the same time). If for some reason you want to mount Victors (and there are 5 in the spares box) you will need to drill mounting holes and find screws for the connections (for some reason we've harvested screws from them). A reminder that the fan connections MUST, let me repeat MUST go on the battery side of the Victor.
GD - 5-25-2010 Last night put black jags on the steering motors. Tested auto mode. The lock up still happens. Next we'll put victors on. Took a motor apart. There are 2 chokes and 2 caps plus the PTC. This has to be some problem of a renosance setting up and heating the PTC. If it happens with victors then window motor suck.
As above dialogue indicates, switching black jaguars for tan did not resolve the steering motor reliability issue. No joy. Next step is to switch to Victors.
Autonomous mode is operating reliably. (3) ball kicks no problem, but these need to be in the 1st ball column. This can interfere with alliance scoring. Angles are worked out for 2nd ball column kicking (22° CW in mid-field; 50° CW in near), but this is not programmed. We have problems today turning off steering in autonomous and eliminating the initial wheel calibration. Steering does not help us in autonomous mode. Don't yet understand this.

Also ordered two new batteries. Trashed the battery charger that failed us at Monty Madness (it failed us again in a subsequent test). Matt found another - we are testing.
Matt is rebuilding Dewbot III as a project and bringing it back into good working order. Dewbot III is a good demonstration robot.
26-May-2010
Paul, Matt, Anthony, Ben R, Jen, Sasha, Douglas, Andrew, Kenneth, Heather McKown, Mike Rizzo, Gary Deaver, Foster Schucker, Scott Featherman, Faith & Clem McKown
Before executing the switch from Jaguars to Victors on the steering motor controllers, Gary Deaver cited a point made on Chief Delphi that the Nippon Denso Window Motors we use for steering possess locking pins which lock the drive under excessive torque and remain locked until that torque is released. We removed these pins from the (4) steering motors and initial tests indicated no problem (but more testing needed to know whether the problem is really solved). Visit the Nippon Denso Window Motor Locking Pins page for detailed information and a photo sequence of pin removal.
The two new batteries were recieved. Leads attached for competition.
The polycarbonate mirror is also in and cut to size. Need to mount this Friday.
Angled autonomous mode tested for the first time. Successfully! There are three settings: Straight-ahead autonomous; angled for mid-field; and angled for near. Set using the toggle switch.
Matt & Anthony worked on returning DEWBOT III to working order for the art show (DEWBOT III is now art!).
Ben R worked on DEWBOT V code.