Difference between revisions of "3-Wheel Swerve"
MaiKangWei (talk | contribs) |
MaiKangWei (talk | contribs) |
||
| Line 1: | Line 1: | ||
The 2013 change in perimeter rules (112 in overall perimeter vis-à-vis 28in x 38 in) open new potentials for non-rectangular robots. The team decided to explore this. | The 2013 change in perimeter rules (112 in overall perimeter vis-à-vis 28in x 38 in) open new potentials for non-rectangular robots. The team decided to explore this. | ||
| − | + | In particular, the new rules enable the design of a 3-wheeled robot without paying as large a penalty in terms of reduced stability. Potential benefits of a 3-wheeled drive-train are reduced drive-train and chassis weight, and/or a drive-train with enhanced features (which might otherwise been impractical due to drive-train weight). Additionally, a 3-wheeled swerve robot reduce burden on the cRIO. A tiangular chassis robot may be able to break a blockage by opposing robots more easily than a rectangular chassis robot due to the reduced corner angle. | |
| − | + | ||
| − | + | <gallery widths=400 heights=400 perrow=2> | |
| + | Image:Tribot111d.jpg|Equilateral triangle design | ||
| + | Image:Roundbot111.jpg|Equilateral swerve in a round chassis | ||
| + | Image:Tribot_130711_csm.jpg|Pentagonal prototype | ||
| + | </gallery> | ||
---- | ---- | ||
[[Category:Robot]][[Category:DEWBOT IX]][[Category:Drive-train]][[Category:Pivot Drive]][[Category:Photo Galleries]] | [[Category:Robot]][[Category:DEWBOT IX]][[Category:Drive-train]][[Category:Pivot Drive]][[Category:Photo Galleries]] | ||
Revision as of 15:50, 4 August 2013
The 2013 change in perimeter rules (112 in overall perimeter vis-à-vis 28in x 38 in) open new potentials for non-rectangular robots. The team decided to explore this.
In particular, the new rules enable the design of a 3-wheeled robot without paying as large a penalty in terms of reduced stability. Potential benefits of a 3-wheeled drive-train are reduced drive-train and chassis weight, and/or a drive-train with enhanced features (which might otherwise been impractical due to drive-train weight). Additionally, a 3-wheeled swerve robot reduce burden on the cRIO. A tiangular chassis robot may be able to break a blockage by opposing robots more easily than a rectangular chassis robot due to the reduced corner angle.
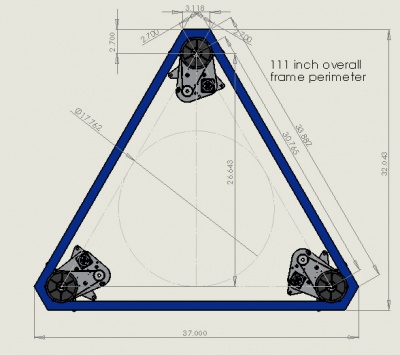
Equilateral triangle design
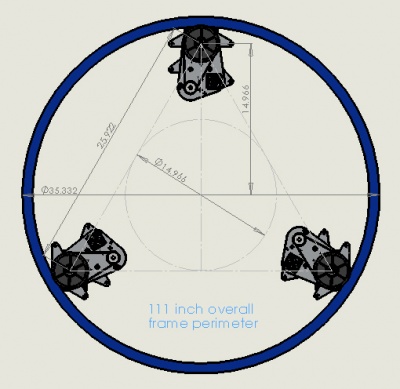
Equilateral swerve in a round chassis

Pentagonal prototype


