3-Wheel Swerve
In particular, the new rules reduce the stability penalty of a 3-wheeled robot design vis-à-vis the preceding 28" x 38" chassis limits.
The team decided to explore this avenue as an off-season project. It actually occupied two off-seasons with work starting in 2013 and continuing in 2014. Urgency increased in 2014 with 6-CIM tank drive becoming established as the competitive standard.
Contents
Benefits & deficits
Known, expected and perceived benefits and potential benefits of a 3-wheeled swerve drive-train are:
- Reduced drive-train weight and cost
- Enabling a more capable swerve drive-train (via 2-CIMS per module and/or shifting) by the consolidation of mass & cost into three modules in lieu of four
- Reduced processing burden on controller (one less PID loop)
- 60° corners could be more effective at driving between opposing robots than 90° corners
- Longer sides could enable longer (wider) side mechanisms such as pick-ups
- Stability is enhanced (vis-à-vis a square bot) during on-point collisions
- Most likely loss-of-wheel-contact scenarios should still leave 2/3rds of wheels in contact with the field surface
Known, expected and perceived deficits of a 3-wheeled swerve drive-train are:
- Reduced stability in general and especially during side-on collisions
- Reduced chassis footprint area will make for a more crowded robot
- Could be easier to block or pin due to longer sides
- Most parts are square and fit more naturally and easily into a square chassis
- We are going to need to remove bumpers to fit through standard width doors
- Wheels will wear more quickly (for same surface area per wheel)
- An ultimately wider chassis could have trouble negotiating a crowded or restricted field
- Joystick controls are more naturally organized for rectangular/square robots
- It is perceived that reduced wheel contact area will reduce traction (not true under Newtonian friction models, but friction is a complex phenomenon)
Chassis Concepts
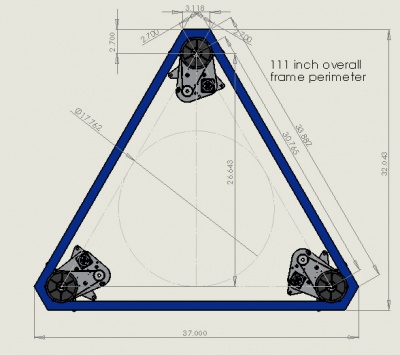
Equilateral triangle design on 111" polygonal perimeter - basis for the accompanying white paper: The Trouble with Tribots
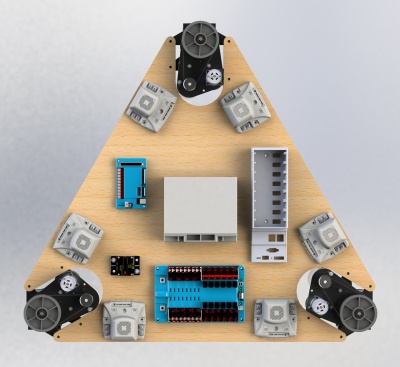
Prototype design based on 111" geometry showing electronics locations
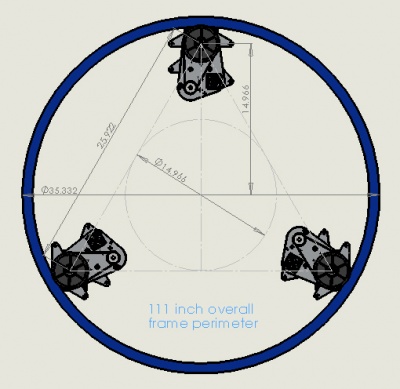
Equilateral swerve in a round chassis on 111" perimeter
Equilateral design
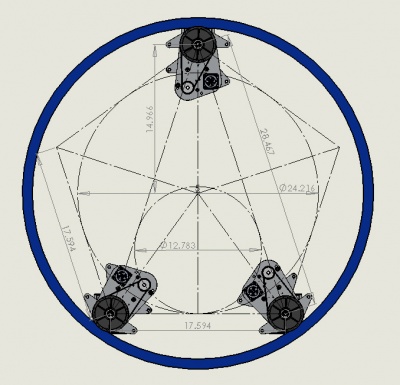
Pentagonal design based on round 111" perimeter. Casters to be located at the (2) vacant positions to improve stability.

Pentagonal roundbot prototype






Stability Calculations
Chassis stability is measured by the outer perimeter of the pivot axes (or casters, if these replace pivots). If the acceleration and incline adjusted projection of the robot's center of mass remains in this perimeter, the robot remains upright; but if that projection falls outside this perimeter, the robot can tip over. When stationary & level, this projection of the center of mass is straight down (gravity being the other acceleration at work). The same is true when the robot is moving at a constant velocity (with velocity being a vector; comprising both speed and direction). Inclining the robot (such as on a ramp), does not change the direction of the projection, but the incline does move the projected point on the field surface. Acceleration (which includes stopping and direction changes) shifts the direction of the projection (the gravitational and negative acceleration vectors are added).
Naturally, chassis stability is angle dependent.
Chassis stability was assessed for chassis with 3, 4, 5 & 6 pivots on a regular polygonal pattern. Pivot axes were 2.7 inches from the frame perimeter (to allow pivot rotation). Chassis perimeters were constant at 111 inches (versus 112 inch 2013 rule maximum). Polygon apexes were truncated to the 2.7" tangent from the pivot axes. The stability of both polygonal and round chassis were determined. DEWBOT IX was included in the analysis as a reference.
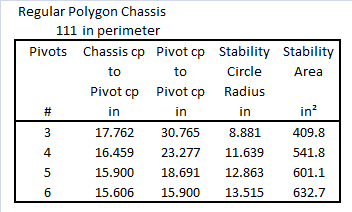
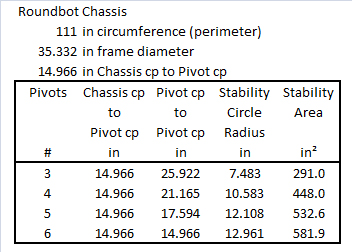

Angular chassis stability of polygonal and round chassis of 111 inch perimeter having 3 to 6 pivots arranged on a regular polygonal pattern with pivot axes 2.7 in from the perimeter
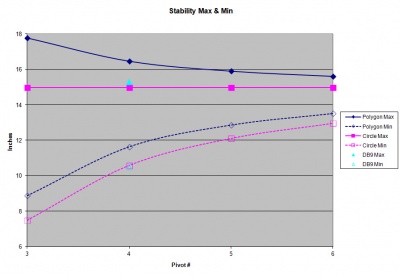
Maximum & minimum stability for the same set of chassis




Control Logic & Mathematics

The new white paper, The Trouble with Tribots, examines the geometry of a 3-swerve drive-train and the control logic needed for its proper function. Crab, snake and ocelot drive modes are defines, together with the mathematics for control. Both chassis-centric and field-centric control is considered.

An Excel worksheet is provided with the working mathematics and look-up tables. The tables are for Snake and Ocelot.
Assembly and Testing

Nicholas programmed the chassis for chassis-centric control and we took it for a spin.
Mackenzie reports very favorably on driving characteristics vis-à-vis DEWBOT X.
2-CIM Swerve Module
Swerve modules were redesigned to accommodate two CIM motors each and geared for higher speed. Each CIM drives its own HTD5 pulley and together they drive a common belt which drives an output pulley on the pivot's coaxial drive shaft. The initial design used 18T pulleys on the CIMs with a 36T output pulley, yielding a 5.33:1 overall reduction (sprocket reduction was unchanged). This was changed to 24T CIM pulleys and 44T output to increase the number of pulley teeth engaging the belt. The 24T:44T combination yields a 4.89:1 overall reduction which should provide a top speed of about 16 ft/s. The drive belt is a 595mm x 15mm HTD5 belt.
Gary Deaver observed that the steering motors were very exposed to potential damage. To protect the steering motors, the steering motor was reversed. The steering belt is a 350mm x 15mm HTD5 belt.

2-CIM swerve with steering motor in top position
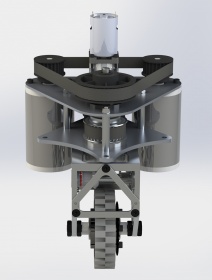
Front on view showing (3) module mount holes in bottom plate
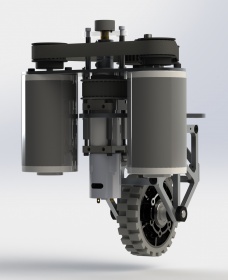
2-CIM swerve with steering motor reversed





Hypothetical Chassis Development

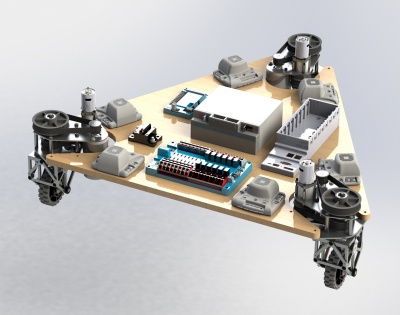
Hypothetical Tribot chassis



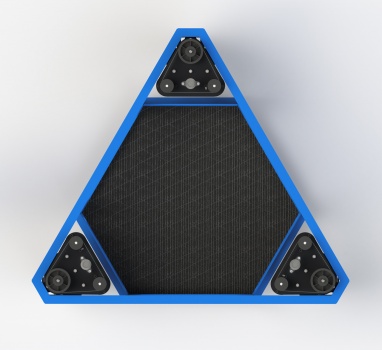
Plan view
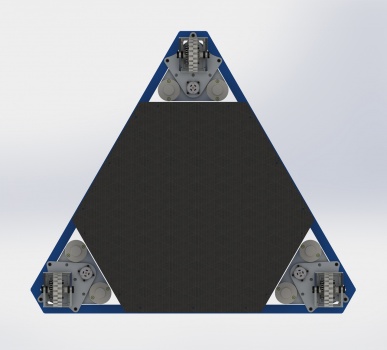
Bottom view


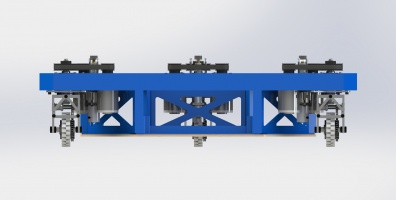
rear elevation
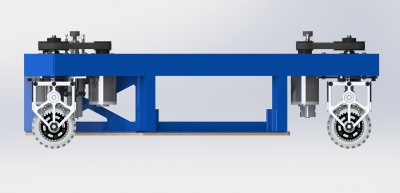
side elevation

