Difference between revisions of "3-Wheel Swerve"
MaiKangWei (talk | contribs) |
MaiKangWei (talk | contribs) |
||
| Line 10: | Line 10: | ||
Image:Pentabot111.jpg|Pentagonal design based on 111" perimeter. Casters to be located at the (2) vacant positions to improve stability. | Image:Pentabot111.jpg|Pentagonal design based on 111" perimeter. Casters to be located at the (2) vacant positions to improve stability. | ||
Image:Tribot_130711_csm.jpg|Pentagonal prototype | Image:Tribot_130711_csm.jpg|Pentagonal prototype | ||
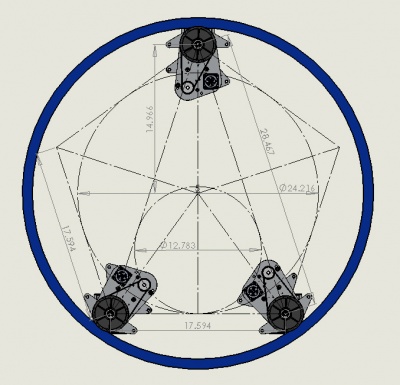
| + | Image:Polygon_round_chassis_stability.jpg|Angular chassis stability of polygonal and round chassis of 111 inch perimeter having 3 to 6 pivots arranged on a regular polygonal pattern with pivot axes 2.7 in from the perimeter | ||
| + | Image:Stability_max_min_chart.jpg|Maximum & minimum stability for the same set of chassis | ||
</gallery> | </gallery> | ||
---- | ---- | ||
[[Category:Robot]][[Category:DEWBOT IX]][[Category:Drive-train]][[Category:Pivot Drive]][[Category:Photo Galleries]] | [[Category:Robot]][[Category:DEWBOT IX]][[Category:Drive-train]][[Category:Pivot Drive]][[Category:Photo Galleries]] | ||
Revision as of 21:29, 5 August 2013
The 2013 change in perimeter rules (112 in overall perimeter vis-à-vis 28in x 38 in) open new potentials for non-rectangular robots. The team decided to explore this.
In particular, the new rules enable the design of a 3-wheeled robot without paying as large a penalty in terms of reduced stability. Potential benefits of a 3-wheeled drive-train are reduced drive-train and chassis weight, and/or a drive-train with enhanced features (which might otherwise been impractical due to drive-train weight). Additionally, a 3-wheeled swerve robot reduce burden on the cRIO. A tiangular chassis robot may be able to break a blockage by opposing robots more easily than a rectangular chassis robot due to the reduced corner angle.
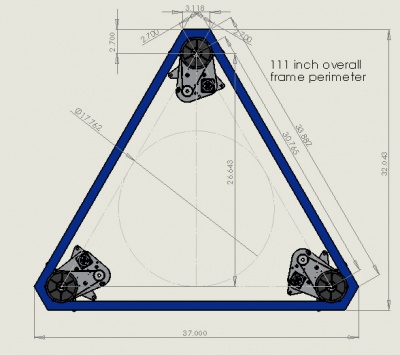
Equilateral triangle design on 111" perimeter
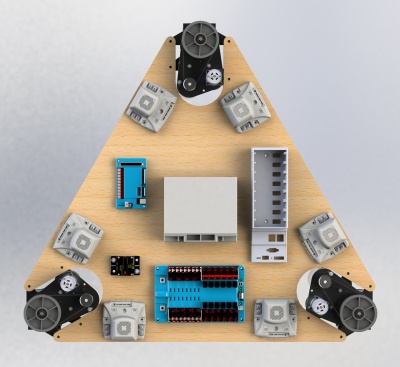
Prototype design based on 111" geometry showing electronics locations
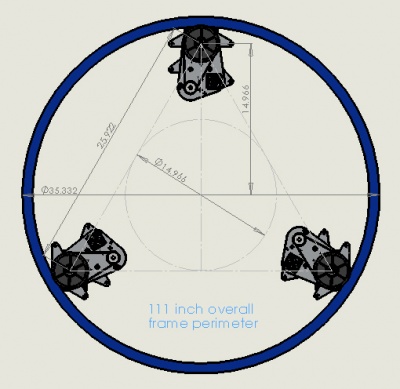
Equilateral swerve in a round chassis on 111" perimeter
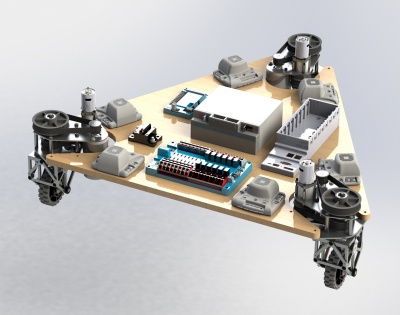
Equilateral design
Pentagonal design based on 111" perimeter. Casters to be located at the (2) vacant positions to improve stability.

Pentagonal prototype

Angular chassis stability of polygonal and round chassis of 111 inch perimeter having 3 to 6 pivots arranged on a regular polygonal pattern with pivot axes 2.7 in from the perimeter
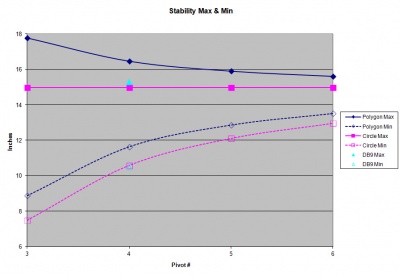
Maximum & minimum stability for the same set of chassis







