Difference between revisions of "DEWBOT VII Arm"
MaiKangWei (talk | contribs) (→Materials of Construction) |
MaiKangWei (talk | contribs) (→Materials of Construction) |
||
| Line 81: | Line 81: | ||
The claw itself is pricipally fabricated from 1/4" polypropylene - light weight with good impact strength (but limited stiffness). | The claw itself is pricipally fabricated from 1/4" polypropylene - light weight with good impact strength (but limited stiffness). | ||
| + | |||
| + | ==Drive== | ||
| + | The arm joint is driven by a FisherPrice motor mounted to a Banebots 4-stage 256:1 planetary gearbox. On the as-shipped robot, this drove a 20T HTD5 pulley which in turn drove a 56T HTD5 pulley mounted to the lower bar (providing an additional 2.8:1 reduction. In practice, this provided arm movement which wa too fast and had to be reduced in software to 60% max output on the upwards drive and 30% on the downward. | ||
| + | |||
| + | |||
---- | ---- | ||
[[Category:Robot]][[Category:DEWBOT VII]] | [[Category:Robot]][[Category:DEWBOT VII]] | ||
Revision as of 01:48, 14 March 2011
DEWBOT VII's arm was developed to meet the following key strategic objectives:
- Elevate possessed Logo Pieces to score at all levels - esp. top - NEED
- Quickly and reliably score Logo Pieces on Scoring Grid - NEED
- Disengage cleanly from Logo Piece & Tower after scoring - NEED
- Assure Logo Piece orientation to facilitate scoring - NEED
- Align Logo Piece with target - z (height) - NEED
- Securely possess inflated Logo Pieces & Ubertubes - NEED
- Pick inflated Logo Pieces off field - NEED
- Load inflated Logo Pieces at Feeder Station - NEED
- Close claw when Logo Piece is at correct penetration - WANT
- Ubertube manually loadable with robot powered-down - NEED
And a few game constraints
- Arm must be manually movable with robot powered down - NEED
- Arm must be within starting envelope at beginning of match - NEED
- In play, arm may not break the 84" cylinder limits - NEED
Not to mention some engineering considerations
- Robot center of mass should remain low & centered for stability
- Arm must be robust & reliable
- Easy to use
Contents
Material Constraints
The team's decision to build a Pivot Drive-Train limited the motors available for the arm & Minibot deployment. These were:
- (1) FischerPrice Motor; and
- (4) Denso window motors.
Pneumatics were also available for the arm & Minibot Deployment.
Concepts - Arm
Three main concepts were examined for the Arm itself
- A lift
- An arm with articulated shoulder & elbow (and a means to adjust logo piece orientation)
- A 4-bar linkage arm with a 2-position articulated wrist (pick-up v. score) and a claw which tucked into the envelope at game start, then deployed at the beginning of autonomous.
The lift was dropped due to considerations that it was too complex, likely to be heavy, and unreliable.
More detailed analysis was performed on the two arm concepts (below) and a prototype of the 4-bar design constructed and tested.
Analysis of arm motion for a robot with a 2-joint arm playing Logomotion. 12 Jan 2011, Clem
Arm analysis 2 for a robot with a 2-joint arm playing Logomotion, includes all scoring pegs. 15 Jan 2011, Siri
4-Bar arm analysis for single-pivot arm playing Logomotion. 17 Jan 2011, Siri
4-Bar CAD report including all configurations with dimensions and actuation (pneumatic cylinders). 28 Jan, Siri.
On the basis of this analysis, and testing of the 4-bar prototype, the 4-bar linkage arm was selected for development. Key factors in this decision were:
- The 4-bar linkage maintains a constant claw angle throughout its range of travel. This simplifies scoring on a multi-level grid.
- Adequate height could be achieved for scoring on the highest target.
- It is operationally much simpler than the shoulder/elbow arm concept - easier to use & program.
- Only one motor is required.
- A spring can be used within the 4-bar structure to partially counterbalance the extended arm's moment arm.
Concepts - Claw
Some prototype work was done on a concept roller claw. This was not pursued far (and probably should have been).
A series of prototype claws were built and tested. Some testing shown below.

Molly picks up white tube as Cory operates pneumatics and Rich Kulik plays drive-train

Scoring a blue square

The drive-train works very hard



Once the 4-bar arm was selected, the claw articulation was also settled to be:
- To facilitate floor pick-up, the top jaw of the claw is articulated. Opening and closing the claw does not move the bottom jaw. The jaw is powered pneumatically, with a 3/4" bore, 3" stroke cylinder.
- Logo pieces on on the floor (therefore parallel to the floor) when picked up; also parallel to the floor if collected at the human player station. For scoring, though, the optimum angle of attack is approximately 45°. An articulated wrist makes the transition between these two orientations. The wrist is also pneumatically powered, also with a 3/4" bore, 3" stroke cylinder.
- The claw must start the match within the 28" x 38" x 60" Logomotion starting envelope. To accomplish this, and still allow the reach needed for floor pickup and scoring on top targets, a third joint is necessary to allow the claw to be tucked into the envelope before match start. This joint is unpowered and deploys by gravity when the wrist is extended at start of play.
The sequence of Arm actions required to score are shown below (in automonous mode).

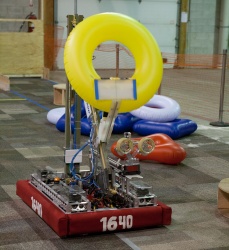
Arm in starting position (inside 28" x 38" x 60" starting envelope) with Ubertube
The wrist extends...

...deploying the claw by gravity

Arm raises - note that the 4-bar linkage arm keeps the claw and Ubertube angle constant as the arm is raised.

Wrist retracts to orient Ubertube for scoring

Ready to score






Materials of Construction
Upright columns are 1½" x 1½" x 1/8" wall fiberglass pultrusion. Upper & lower 4-bar linkage elements are 1" x 1" x 1/8" wall fiberglass pultrusion. All fiberglass pultrusion elements have their working ends re-enforced by filling with chopped carbon fiber/epoxy composite.
The claw end of the 4-bar linkage, the "triangle", is luan-plywood core carbon fiber/epoxy composite. Stiff & light weight.
The claw itself is pricipally fabricated from 1/4" polypropylene - light weight with good impact strength (but limited stiffness).
Drive
The arm joint is driven by a FisherPrice motor mounted to a Banebots 4-stage 256:1 planetary gearbox. On the as-shipped robot, this drove a 20T HTD5 pulley which in turn drove a 56T HTD5 pulley mounted to the lower bar (providing an additional 2.8:1 reduction. In practice, this provided arm movement which wa too fast and had to be reduced in software to 60% max output on the upwards drive and 30% on the downward.